FORUM: Robotica, CNC, 3D
Finalmente un posto dove poter discutere di robotica di CNC e stampanti 3D, scambiarsi idee, progetti ed opinioni. Partecipa anche tu...
Rileggendo il post, noto che mi sono dimenticato di dire, che mentre vi posto le foto di pezzi gia' realizzati, io sto continuando a lavorare sull'Hardware, spero di mettermi in carreggiata con le cose da farvi vedere e quelle che sto ancora realizzando cosi' spero di avere anche dei commenti sul pezzo che sta in lavorazione in quel momento.
Grazie.
Ciao
Ciro.
RevRobot
postato il: 08.06.2017, alle ore 09:35
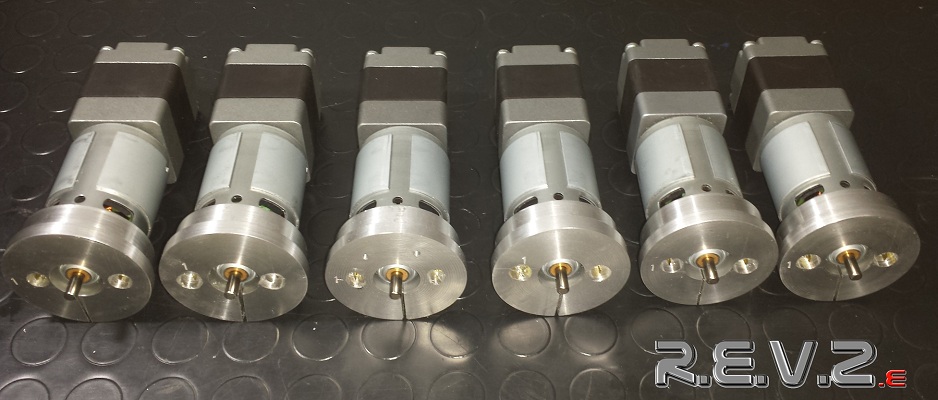
[b]Ed eccole qui tutte belle lucide in attesa di essere solo montate.[/b]
Una breve Animazione per rendere piu' chiaro il lavoro una volta ultimato.
https://youtu.be/0iiW_6Uj10c
Finito la fresatura dei collari, era la parte più monotona, perchè essendo tutto manuale, si deve stare attenti alle misure se non si vuole buttare un pezzo da 1 ora di lavoro.
Ecco le sequenze del lavoro ultimato.
Adesso mi resta solo creare i fori per il passaggio del perno da 3mm e la filettatura, perciò come detto in precedenza userò per questo 2 punte, una da 3,1mm per il passaggio del perno da 3mm mentre la parte della filettatura una punta da 2,3mm.
Avrete notato che c'e' una piccola differenza tra il pezzo campione e questi, ho lavorato di meno il pezzo (Lato sinistro della foto) rispetto (al lato destro).
1° per risparmiare tempo e materiale e poi 2° la parte sinistra passa solo la filettatura rispetto al lato destro che c'e' anche la testa del perno.
In più sempre sotto suggerimento di Lucio, ho spianato un po il lato destro per far si che la testa del perno poggiasse per intero sulla superficie del collare e non solo ai lati (Vedere qualche foto indietro nei post).
[b]Uno scatto lo merita questo strumento, un adattatore per gestire l'asse Z su un tornio che solo grazie a lui sono riuscito nell'intento. [/b]
[b]Ed eccoli tutti allineati per l'ultimo Step di lavorazione e poi al montaggio sui motori.[/b]
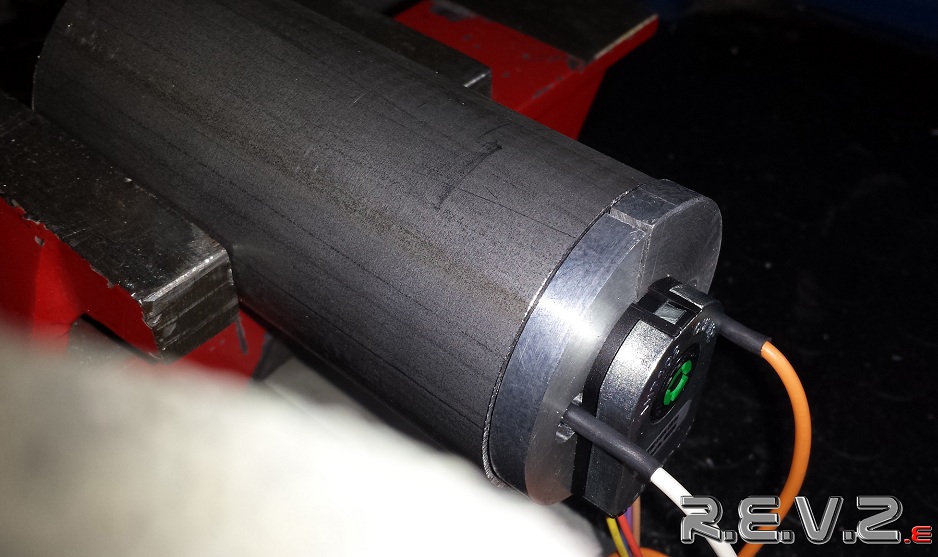
[b]Ed'eccoli tutti i collari montati sui motori, adesso mi resta solo di fissare gli encoder.[/b]
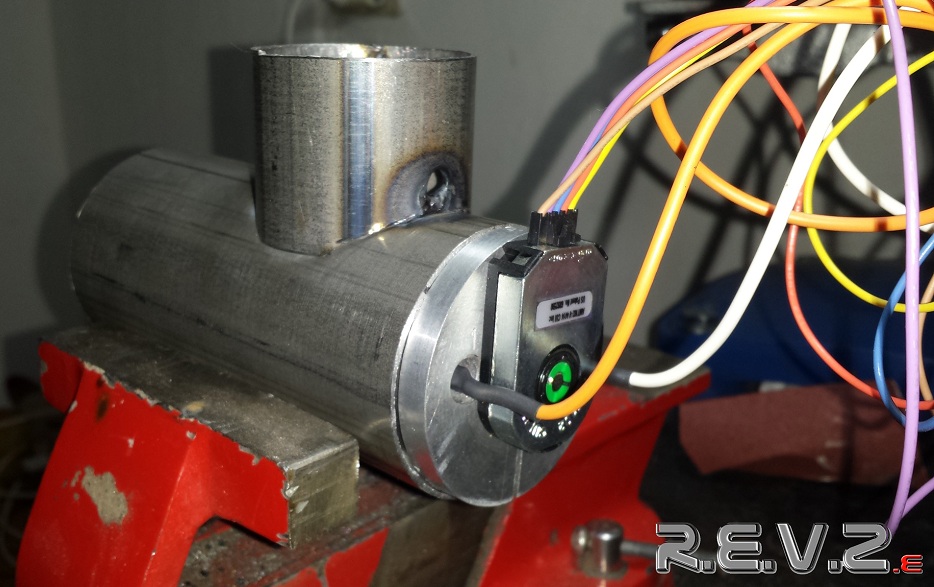
[b]Montaggio encoder sui nuovi collari, adesso facciamoli girare ...[/b]
Il Prossimo Step, seguiremo la lavorazione dei supporti motori saldati al Rocker Bogie System, un lavoro da fare con molta attenzione e livellare bene i pezzi prima di saldarli altrimenti l'intera struttura sara' squilibrata.
[b]Continua....[/b]
Ciao
Ciro.
RevRobot
postato il: 08.06.2017, alle ore 11:41
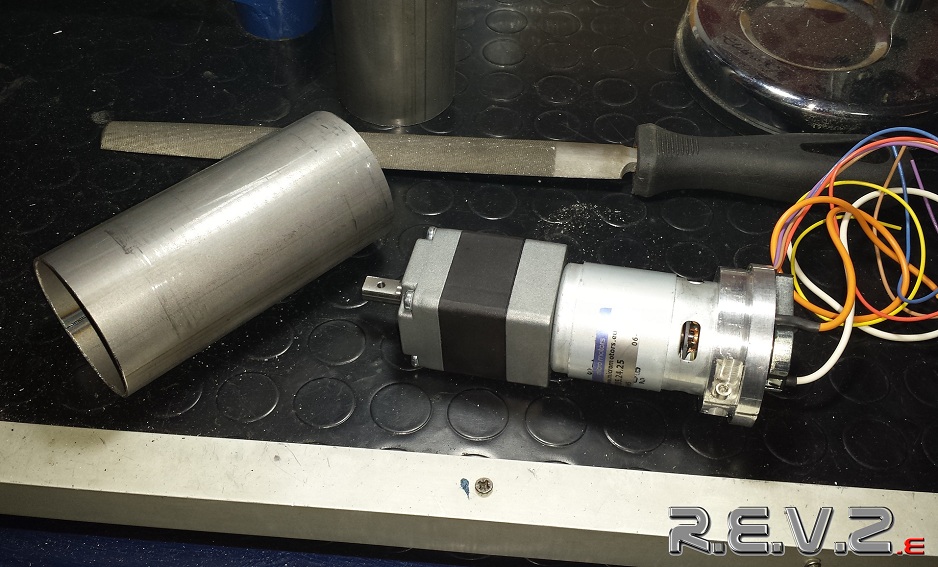
Il tubolare che vedete già tagliato a misura ha un diametro di 60mm con una sezione lamiera di 2mm, molto leggero anche se in ferro.
Adesso riusciamo a capire il perchè ho lasciato quel gradino sul collare?
Prendiamo la saldatrice, regoliamo gli amperaggi a 35A altrimenti foriamo la lamiera , iniziamo a dare SOLO 2 punti di saldatura, credetemi bastano perchè non è un pezzo molto sollecitato.
Qui si nota l'attimo di distrazione mantenendo l'elettrodo un po di tempo in più sul pezzo ed ecco un forellino, passabile dai.....l'otturerò con un po di stucco quando lo vernicerò
Adesso per far si che la sterzata abbia meno attrito possibile, ho usato dei cuscinetti conici a rulli, ne mettero' 2 per ogni piantone.
La prima cosa è creare una sede nel mio caso in alluminio, che andrà a pressione nel tubolare.
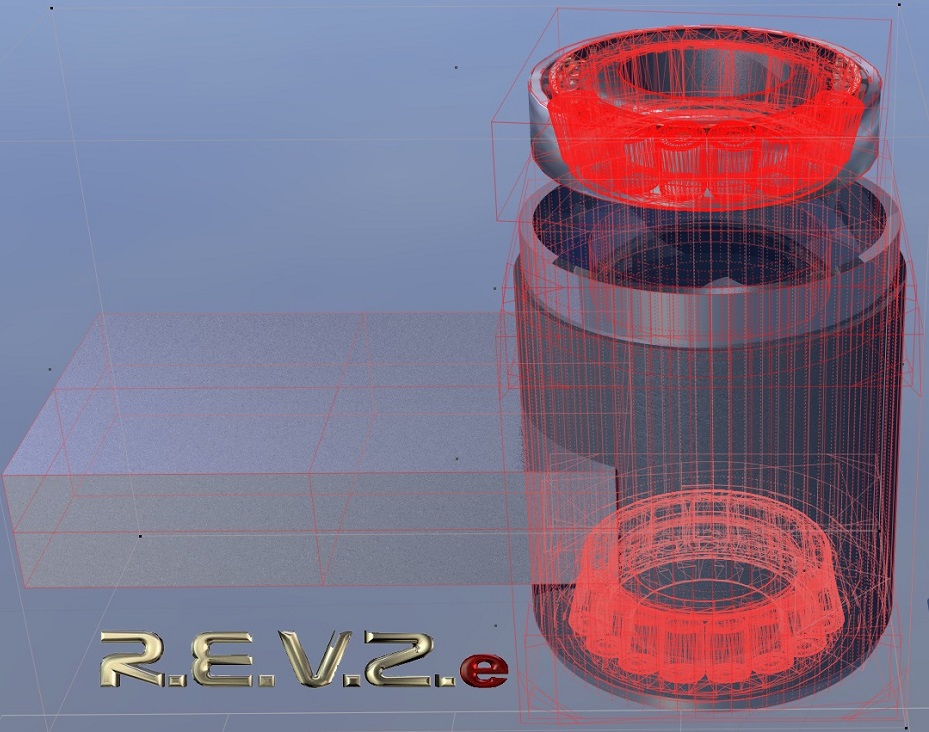
La prima cosa e' mettere l'idea in grafica nel mio caso in 3D, questo per commettere meno errori e buttare soldi e materiale.
La sede in alluminio lo messa un po fuori sede (scusate il giro di parole) per rendere l'idea dove verrà collocata.
Il Pezzo finito sara' così.
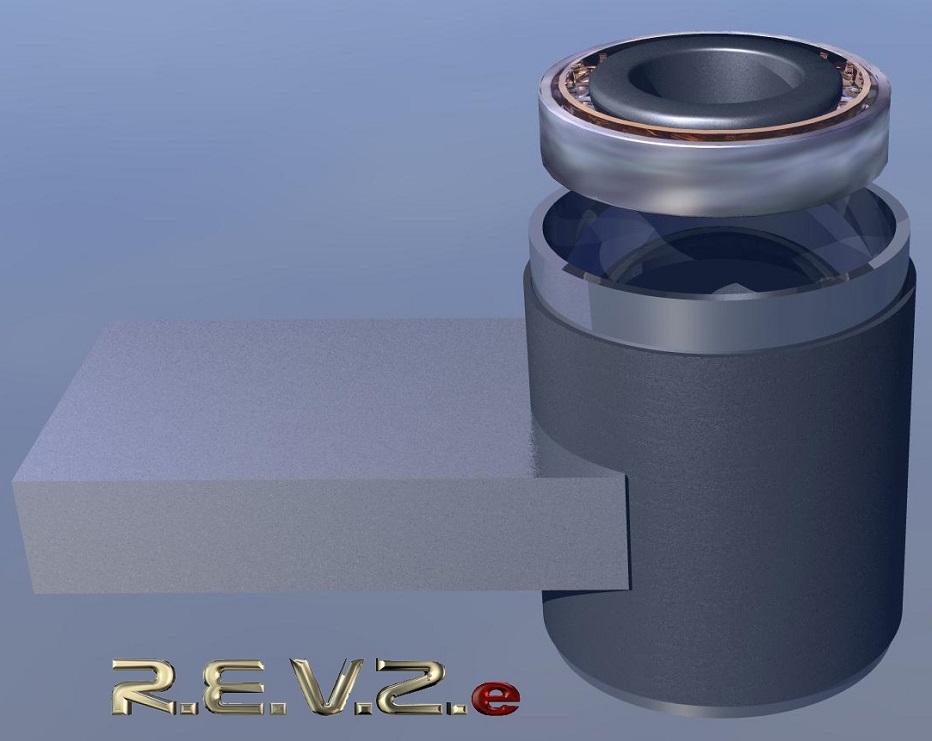
Vista dell'intero pezzo una volta finito:
I cuscinetti da me utilizzati sono questi:
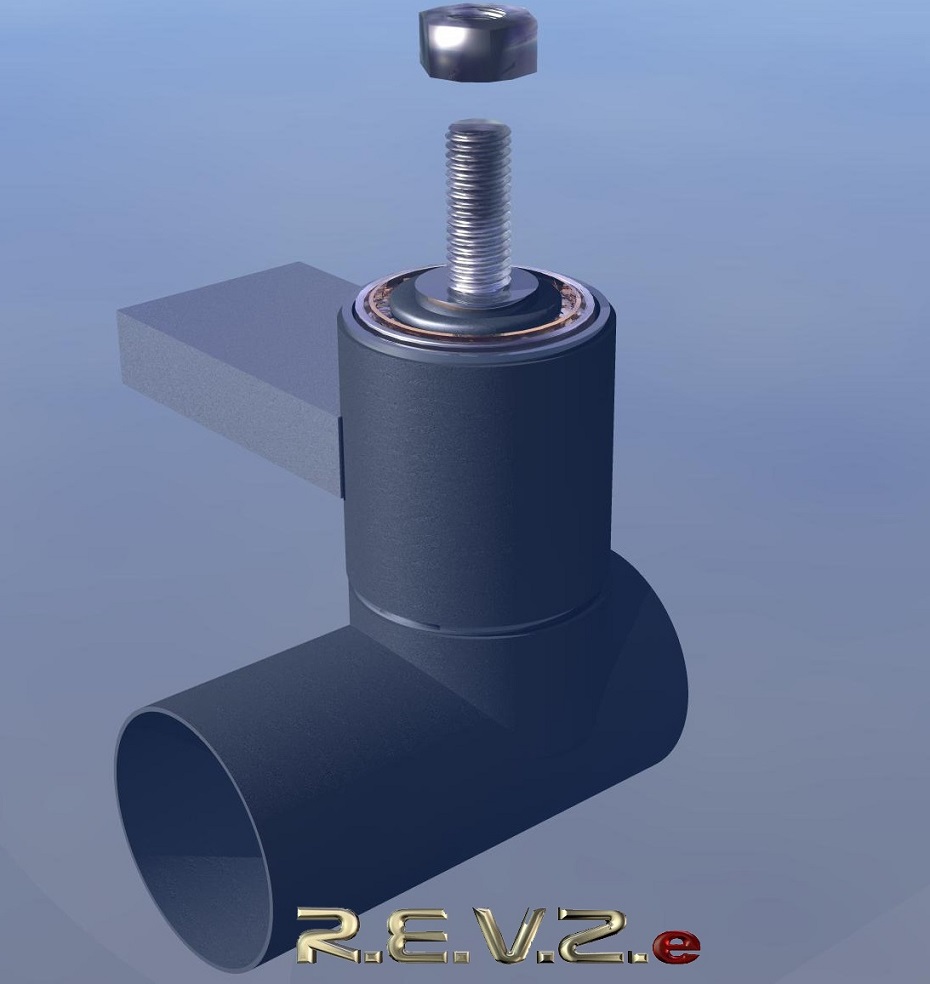
Creazione del supporto o sede per il cuscinetto conico.
Il primo pezzo è quasi finito, manca solo qualche saldatura.
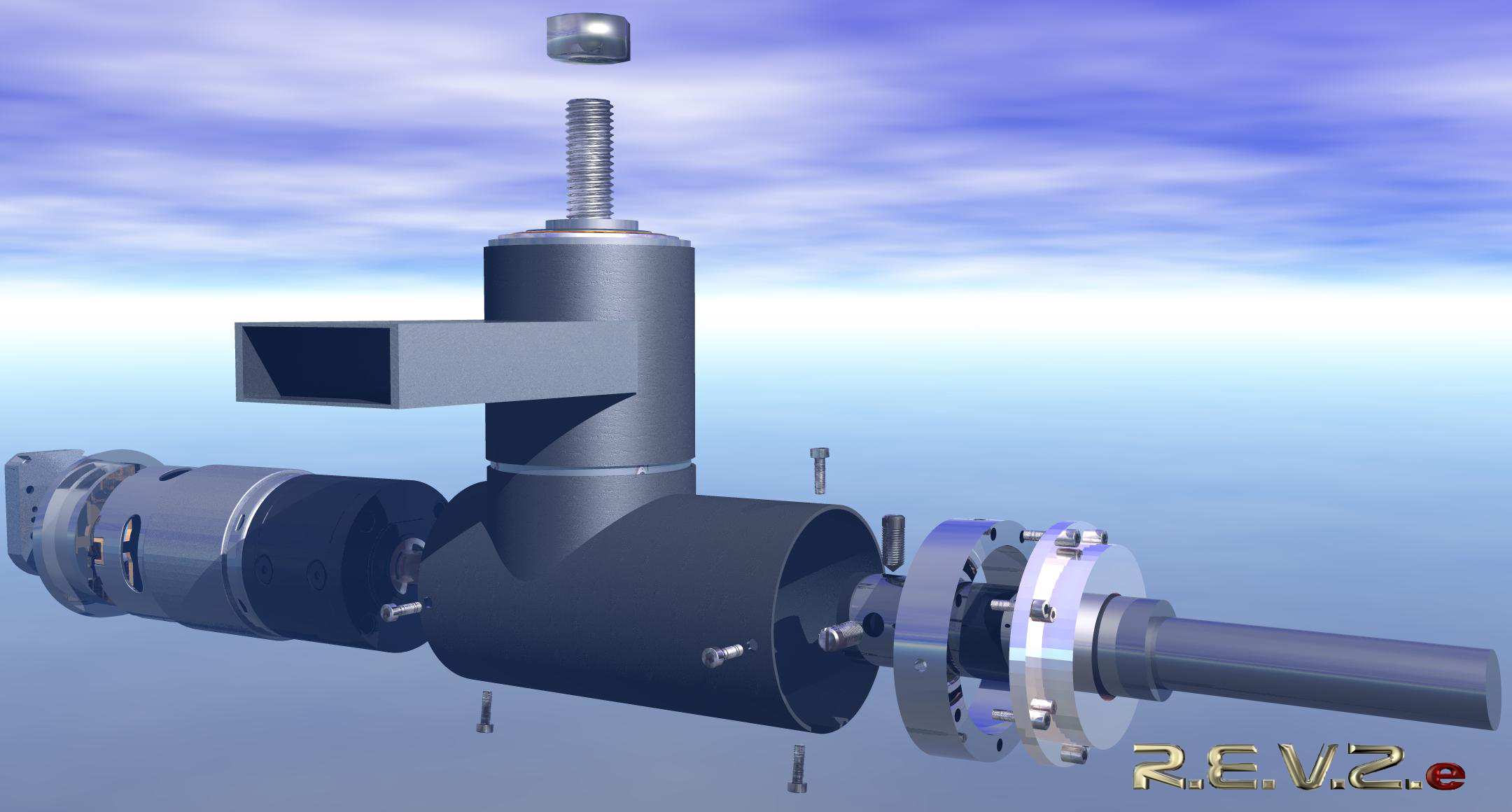
Questo è la realizzazione finita con l'albero che unirà il motore con alla ruota.
Questo è il movimento che dovrà fare il cuscinetto, girare la ruota verso l'interno di 45° e riportarla indietro in posizione di marcia.
Prossimo Step, realizzazione del movimento della sterzata usando degli Attuatori Lineari.
Ciao Amilcare,
Magari mostrare in dettaglio il rover per poi prendermi un "Bel Lavoro" e' nient'altro hahahaha.
Per ora sto mostrando cosa ho in mano e come l'ho ottenuto, ma se per Voi non va bene, posso anche saltare tutti i dettagli e farVi vedere dove sono arrivato e cosa dovrei ancora fare con il vostro Aiuto "Sempre se Volete" !!!
Ma sicuramente per chi e' interessato al progetto, mi scateneranno addosso una valanga di domande .. ma come funziona quella cosa o quale cuscinetto hai usato o dimensioni e o altro ancora.
Io andrei al sodo e chiarirei tutti i dubbi che vengono chiesti.
Sono abituato a guardare il tragitto che devo ancora percorrere piuttosto che guardarmi indietro per vedere il tragitto percorso.
Se poi devo dare dei chiarimenti non mi tiro indietro ma è mia abitudine guardare sempre verso il futuro, verso nuove sfide.
Il passato per sua definizione è passato, ora vivo nel presente e cerco di affrontare il futuro
Naturalmente il rover come si riesce a vedere e\' senza controllo, il test era solo per verificare la struttura e se i motori con 65Kg sopra non andassero sotto sforzo, anche perchè il rover tende ad aumentare ancora un 10Kg per il braccio che ancora non ho montato.
Il prossimo Step metto a nudo la mia idea per la gestione e quì spero di aprire un dibattito su cosa e\' meglio.
Grazie ancora.
Ciao
Ciro.
RevRobot
postato il: 08.06.2017, alle ore 16:51
Logica Rover:
Da premettere che conosco sistemi Windows e non Linux ma c'e' sempre tempo di imparare se la strada dovrà essere quella.
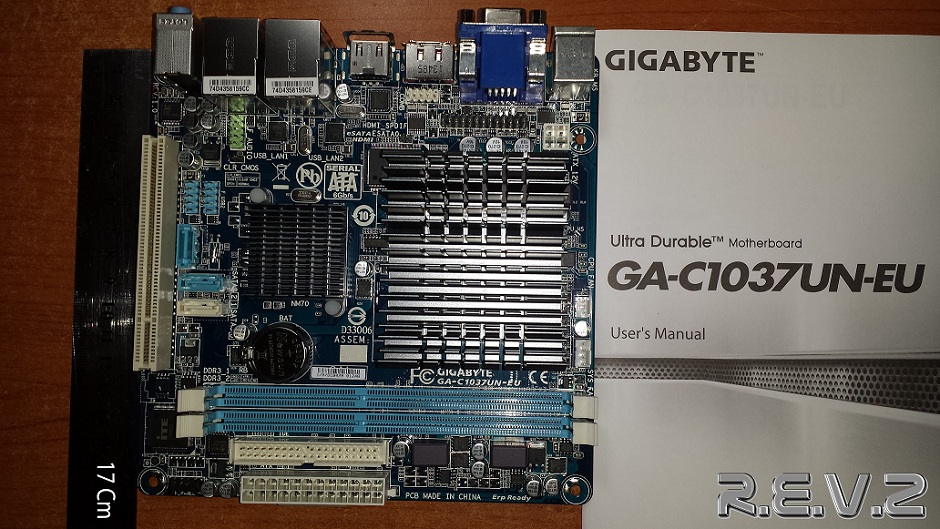
Avrei pensato di utilizzare due Livelli di Logiche diverse, la prima Primaria formata da una PcBoard (motherboard Intel) questa:
Piccola di soli 17Cm:
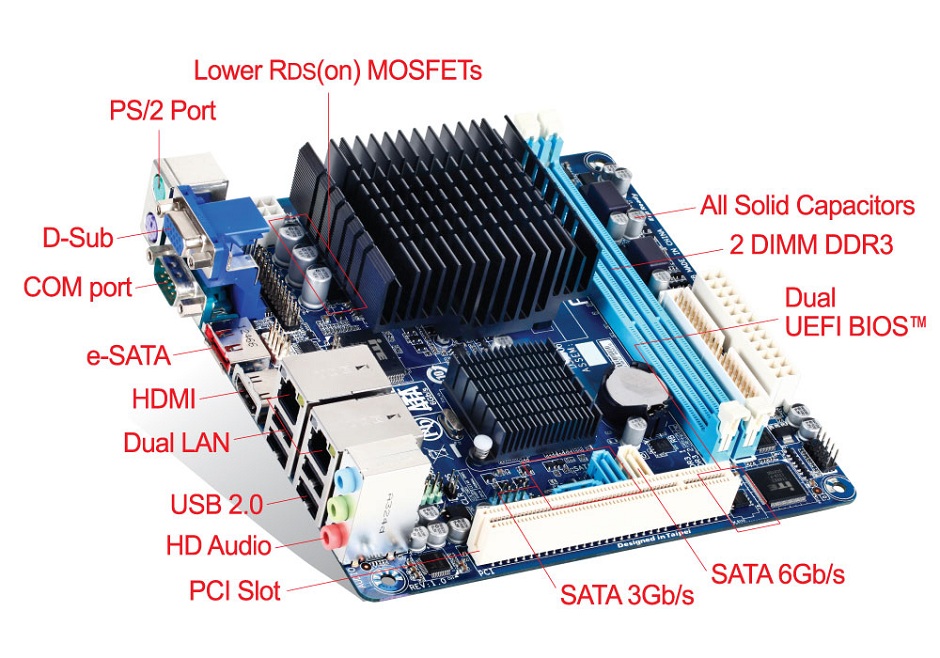
Con queste caratteristiche :
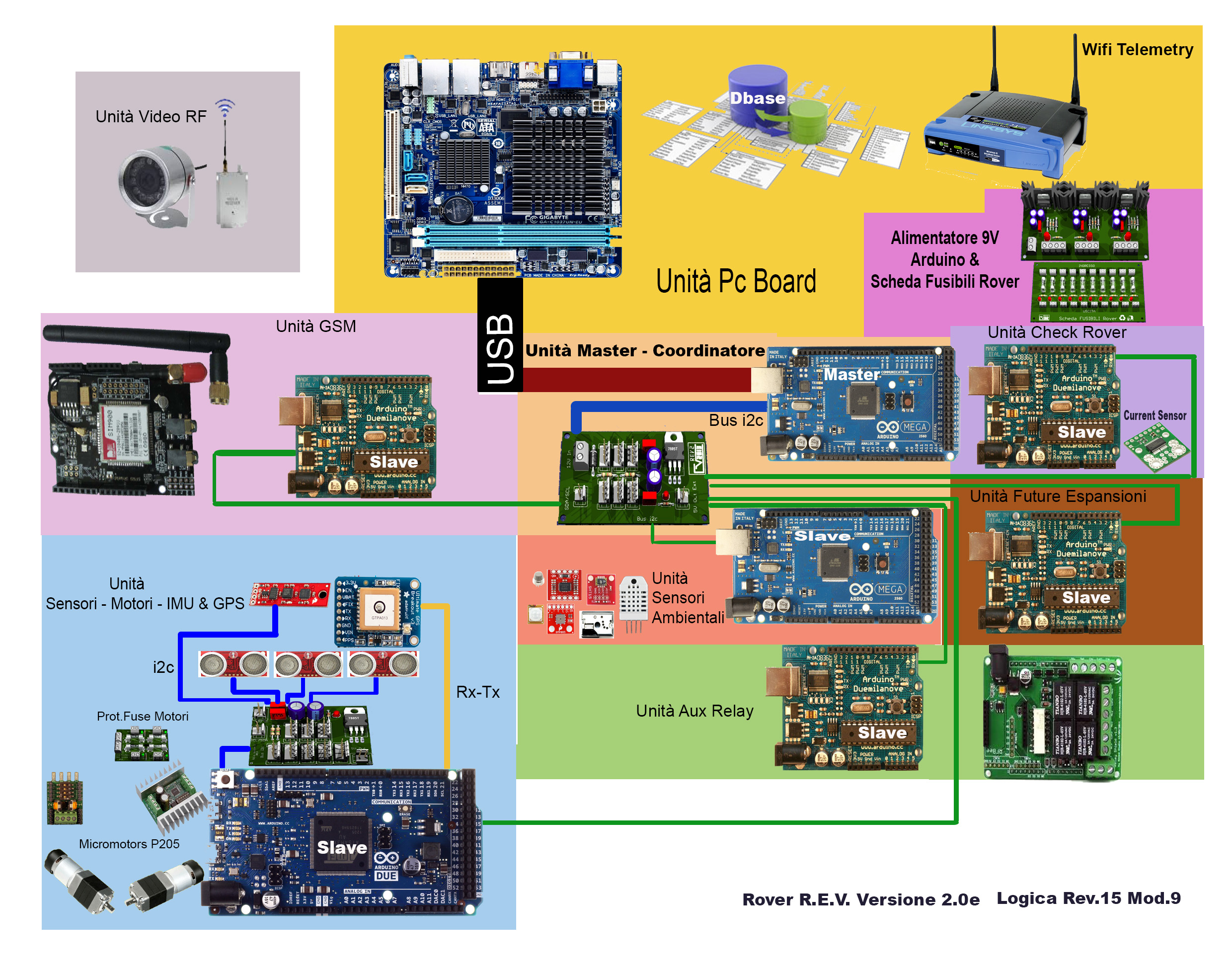
Su questa scheda avrei intenzioni di far arrivare tutti i dati dalle zone periferiche Logica di secondo Livello formato da MC Arduino Mega o Uno.
I dati potranno pervenire da Sensori per ostacoli o forti dislivelli inaccessibile per il rover, dai Sensori ambientali, temperature, umidita' tossicita' dell'aria e del terreno e da altri strumenti di bordo, questi Dati tutti viaggeranno o su BUS Usb (non troppo affidabile) o su un protocollo scritto su BUS RS485:
collegati alla porta USB della PcBoard tramite questo:
Sulla PcBoard creare un software in VB o VB.Net per elaborare dati, archiviarli in un Dbase in piu' trasferirli tramite un Router Wifi alla Postazione Base come questa che ho preso dalla rete:
Credo di non aver dimenticato niente, possiamo iniziare da dove si vuole.
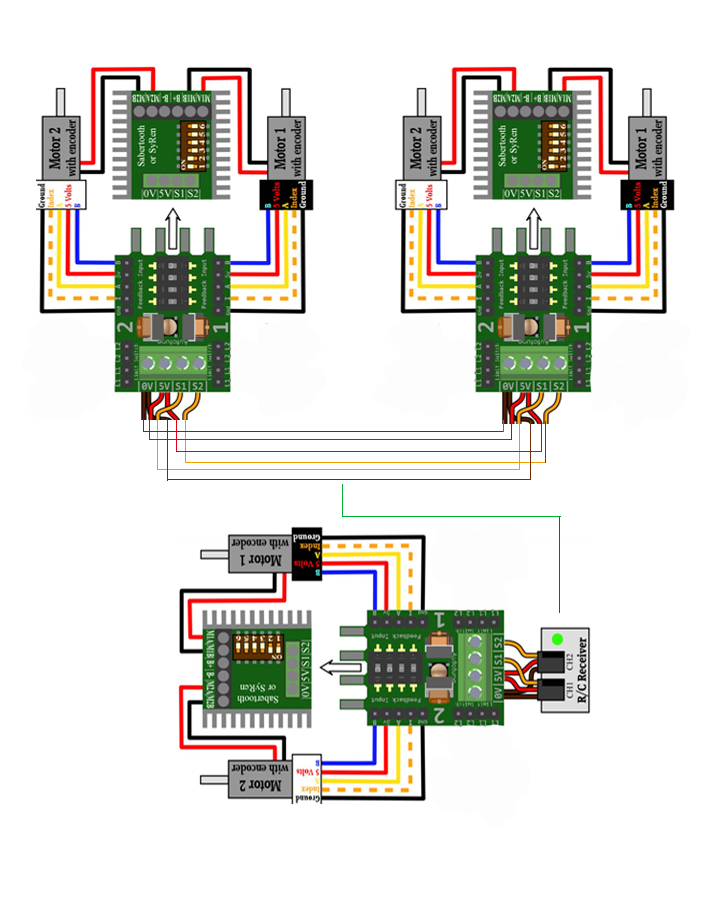
Anche se suggerirei dalla navigazione assistita cioe' con un RC collegato in questo modo:
Qualcuno ha gia' avuto esperienza con questi controller, parlo del Kangaroo x2 motion controller collegato al Sabertooth dual 32A motor driver o simile ?
Grazie.
Ciao
Ciro.
RevRobot
postato il: 08.06.2017, alle ore 17:53
Per avere una vista piu' ampia della logica, avevo uno schema a blocchi, in piu' rettifico quando ho detto nel post precedente BUS USB volevo dire Bus I2c che e' instabile se qualche periferica si blocca non viene gestita e va in loop, così vorrei usare un Bus Rs485, in questo schema c'e' ancora scritto Bus I2c ma prendetelo per buono come Rs485.
Buona Serata.
Ciao
Ciro.
theremino
postato il: 08.06.2017, alle ore 18:13
RevRobot: ... una PcBoard (motherboard Intel)...
Mi sembrano costose e anche poco potenti. Potrei sbagliarmi perché lo desumo solo dalle immagini ma prova a fare il confronto di caratteristiche con queste quad core per 1.8 giga che costano circa 90 Euro con Windows10 e spedizione compresa.
Come utente anonimo puoi leggere il contenuto di questo forum ma per aprire una discussione
o per partecipare ad una discussione esistente devi essere registrato ed accedere al sito






































 RevRobot:
RevRobot: