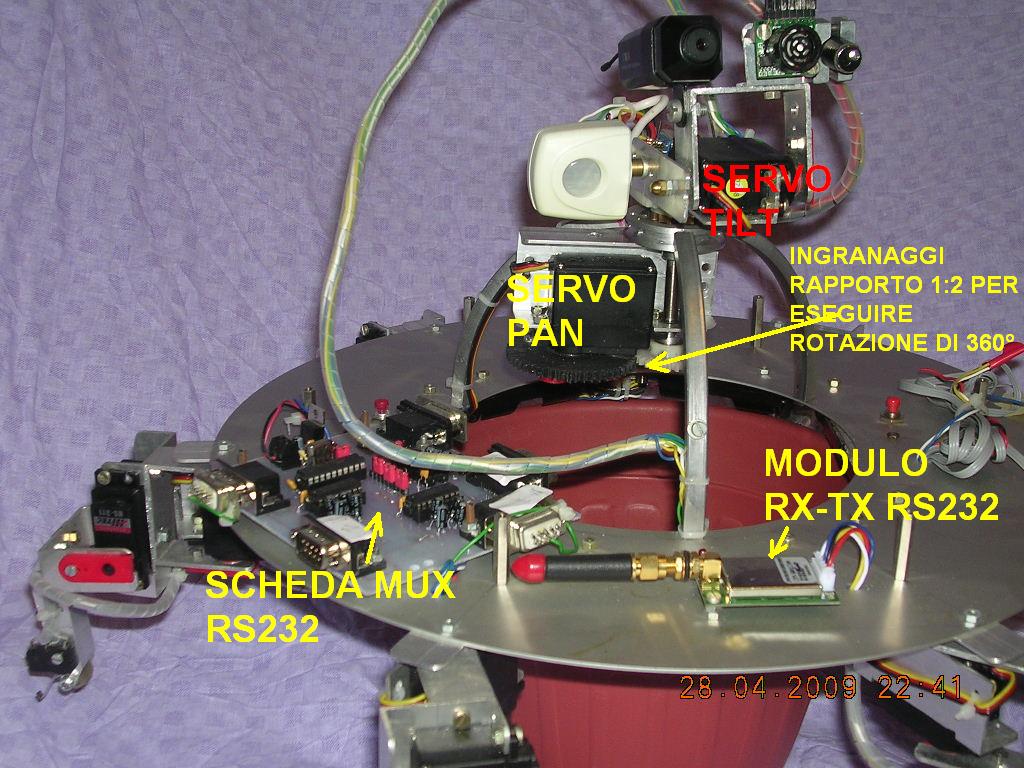
VISTA POSTERIORE TESTA ROTANTE
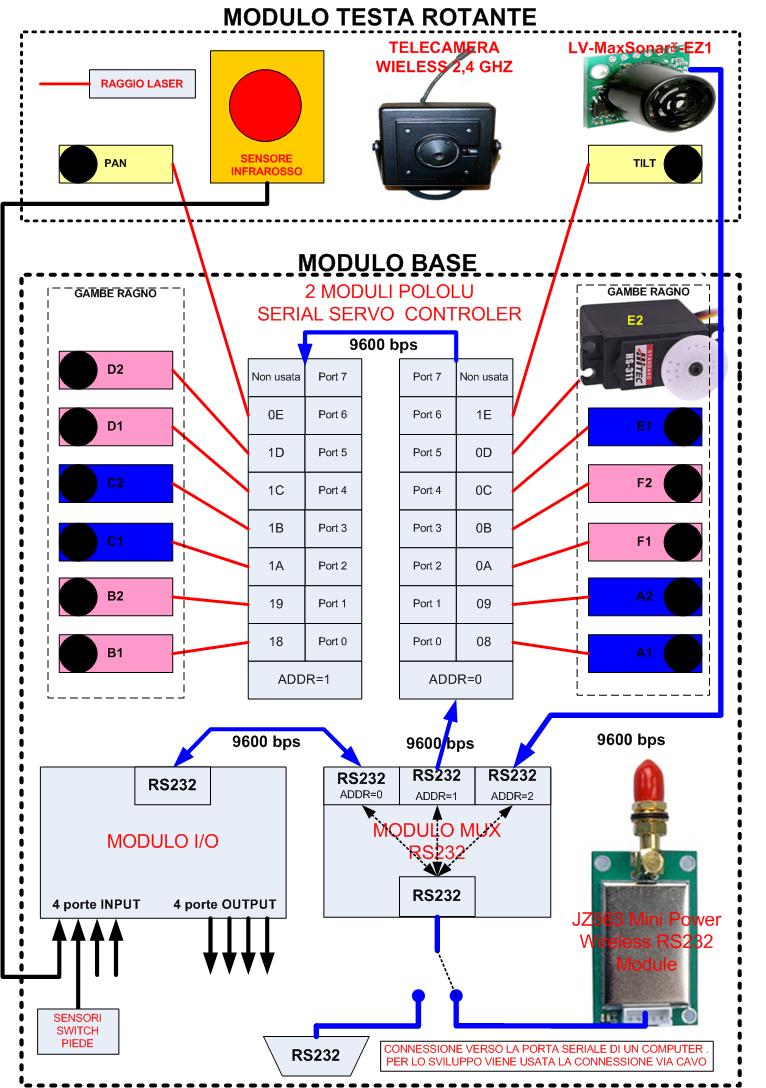
MODULO BASE è un pochino più complesso ed e' composto da: 12 servomeccanismi mod. "HITech HS-311" necessari per la costruzione delle 6 gambe del robot utilizzando 2 servo per gamba (per ogni gamba avrei dovuto utilizzare 3 sevo per avere un movimento ottimale ma per ridurre i costi mi sono adattato ...). (cliccare qui per vedere il DATASHEET) I servo motori sono rappresentati con due colorazioni differenti perchè più avanti serviranno a comprendere il movimento delle gambe del ragno. 2 moduli servo controller della POLOLU utilizzati per pilotare i servomotori. I moduli sono configurati con differenti address (0 e 1 ) e connessi al modulo multiplexer RS232. (cliccare qui per vedere il DATASHEET) 1 modulo multiplexer RS232 autocostruito per pilotare con un unica seriale più dispositivi seriali RS232. 1 modulo I/O RS232 autocostruito per gestire con un protocollo seriale RS232 4 porte in input e 4 porte in output. 1 modulo RADIO-RS232 mod. JZ883 per trasmettere e ricevere i dati seriali via radio. 12 batterie ricaricabili da 1.2 NI-HI 5 batterie in serie (6,0 volt) utilizzate per alimentare i servomotori (stilo da 2500 ma garantiscono un' autonomia di circa 12 minuti) e 7 batterie in serie (8,4 volt) utilizzate per le alimentazioni dei circuiti elettronici previo un riduttore di tensione a 5 volt (7805). Le alimentazioni devono essere assolutamente separate per evitare interferenze o disturbi provocati dai motori dei servo. Per darvi una idea delle dimensioni del robot il disco rotondo che funge da base e' stato recuperato da un vecchio DISCO REMOVIBILE da 80 MB del diametro di circa 36 cm. VISTA SUPERIORE MODULO BASE
VISTA PROFILO MODULO BASE
VISTA INFERIORE MODULO BASE
Descrizione dell' architettura hardware del MODULO GESTIONE E CONTROLLO Nel seguente disegno è rappresentato lo schema a blocchi della sezione TX-RX dati e RX segnale video trasmesso dalla testa del ROBOT. Il tutto e' collegato a delle porte USB di un PC portatile o desktop. Il modulo di controllo e composta di: MODULO TX-RX DATI 1 modulo RADIO-RS232 mod. JZ883 per trasmettere e ricevere i dati seriali via radio. 1 cavo convertitore da SERIALE a USB utilizzato solo per il portatile che non dispone di porta seriale RS232. 1 cavo USB utilizzato solo per prelevare i +5 e la massa per alimentare il modulo WIRELESS RS232 MODULO RX VIDEO 1 ricevitore video a 2,4 Ghz 1 modulo USB per VIDEO CATTURA Descrizione dell' architettura SOFTWARE del ROBOT Qui le cose per me si complicano perchè devo trovare un equilibrio tra la sinstesi di spiegazione contro una descrizione prolissa e noiosa. Nel rettangolo evidenziato dal bordo rosso sono descritti i moduli software che vengono eseguiti in contemporanea sul PC per il controllo del robot; ricordo che tutto, anche i movimenti delle gambe e la rotazione della testa sono gestite e controllate dal PC. Le frecce nere indicano la direzione dei dati che vengono scambiati tar i vari moduli software. I colori dei rettangoli evidenziano la tipologia del software (vedi leggenda alla fine del disegno).
Oltre al software "farina del proprio sacco..." (evidenziato in ARANCIONE) e ai driver SW forniti dal costruttore utilizzati per il modulo di VIDEO CAPTURE e per convertitore da USB a RS232 (evidenziati in GIALLO) sono stati utilizzati i seguenti software presenti in rete (evidenziati in VERDE CHIARO): ROBOREALM: e' un software "image processing" per la robotica ed e' gratuito per HOBBY ed uso personale. http://www.roborealm.com/. VIRTUAL SERIAL PORT DRIVER: e' un software per emulare delle porte seriali virtuali connesse in NULL MODEM. http://www.virtualserialport.com/products/vspdxp/
FINE PRIMA PARTE
|
|
|
Lo staff di www.grix.it non si assume responsabilità sul contenuto di questa pagina. |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||








.jpg)






