RevRobot
RevRobot:
Buongiorno a tutti,
prima di iniziare a parlare del telaio che e' l'ossatura del rover, vorrei spendere due parole sui motori che ho usato per questo progetto.
MOTORI:
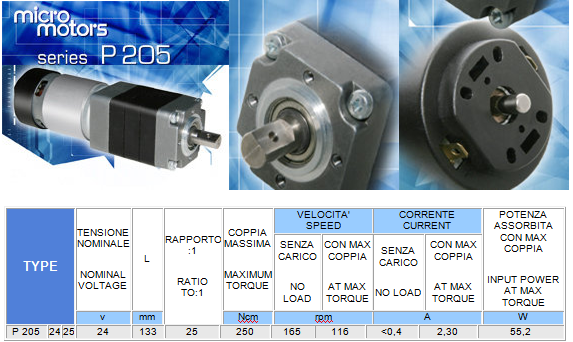
Il Rover ha 6 Motoriduttore epicicloidale modello P205.24.25 della MicroMotors.
Soppressione disturbi motore con VDR.
Albero di uscita supportato da due cuscinetti a sfera.
Massimo carico radiale: 300N (a 10 mm dalla flangia di fissaggio).
Massimo carico assiale: 150N.
Direzione di rotazione secondo polarità.
Può essere montato in ogni posizione.
Temperatura di esercizio: -20°C/60°C
Peso approssimativo:700/900g
e' possibile applicare un encoder.
Le batterie che verranno installate sono divise in due pacchi batterie, il primo formato da 8 batterie da 3,2V 15 Ah in serie per avere 25.6V e' alimentano l'intero rover, mentre il secondo pacco batterie formato da 4 unita' di 3,2V 10 Ah per un totale di12,8V che servira' solo per la PcBoard e Logica di secondo Livello.


[url=
http://senzaricettaprescrizione.com]cialis senza ricetta[/url]
Caratteristiche Batteria :
BA1290 BATTERIA LiFePO4 3,2V 15A
CON BOX IN ALLUMINIO
Batteria litio -ferro fosfato industriale realizzata con tecnologia LiFePO4
accuratamente selezionate ed omogenee nelle caratteristiche elettriche
scafo in alluminio per una maggiore resistenza alle sollecitazioni.
Voltaggio nominale 3,2volt
Voltaggio operativo 2,5-3,65volt
Carica iniziale 4,2 volt
Carica standard 3,65volt
Nessun effetto memoria
Robusto involucro esterno in alluminio
Durata oltre 2000 cicli di carica e scarica (0,3C DOD 80%)
Iniziamo con la meccanica per la costruzione del rover: