FORUM: Robotica, CNC, 3D
Finalmente un posto dove poter discutere di robotica di CNC e stampanti 3D, scambiarsi idee, progetti ed opinioni. Partecipa anche tu...
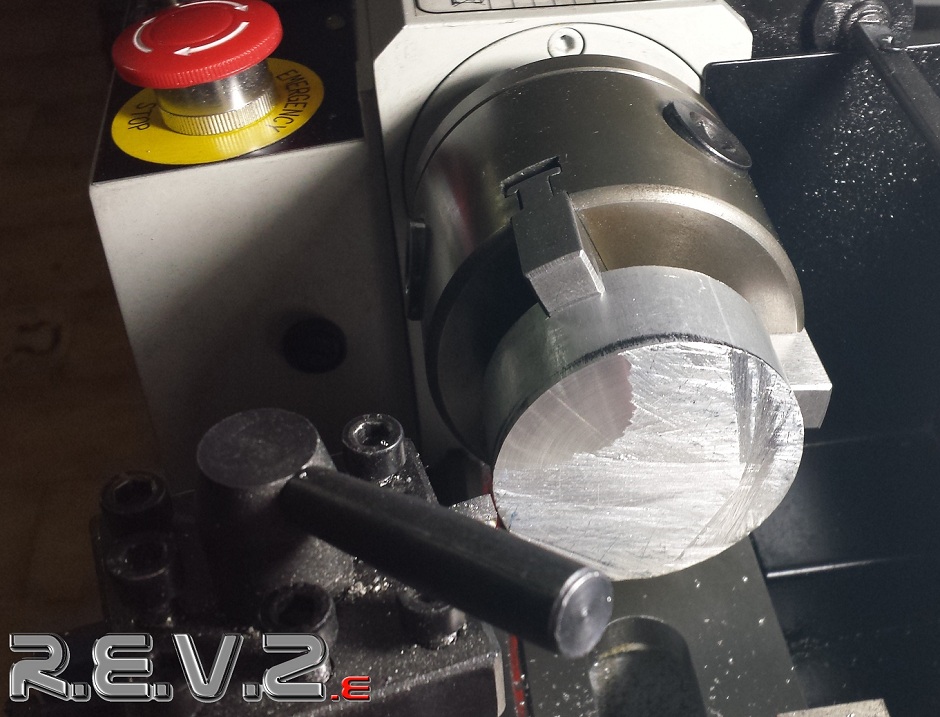
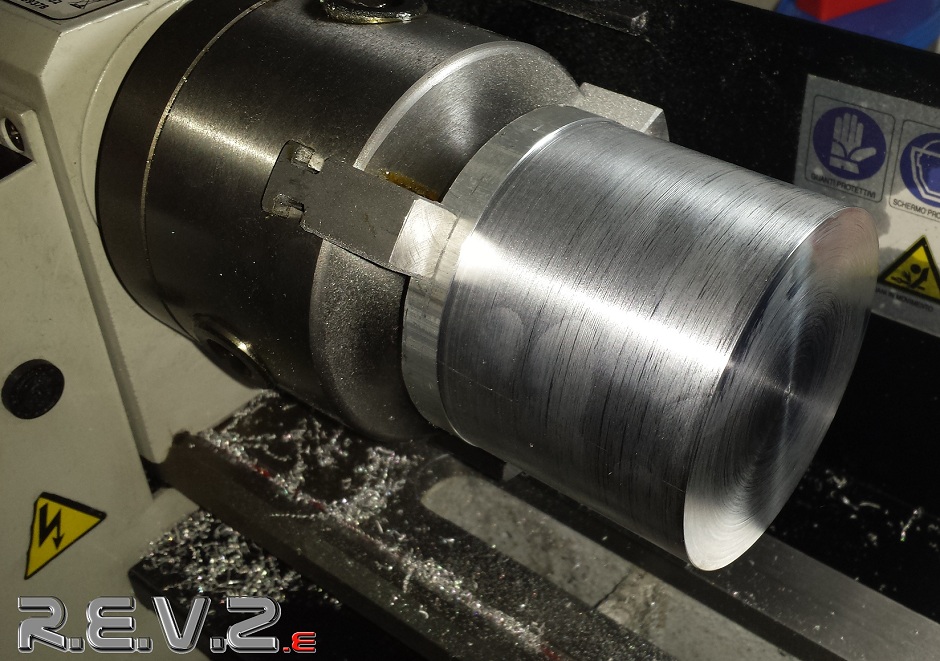
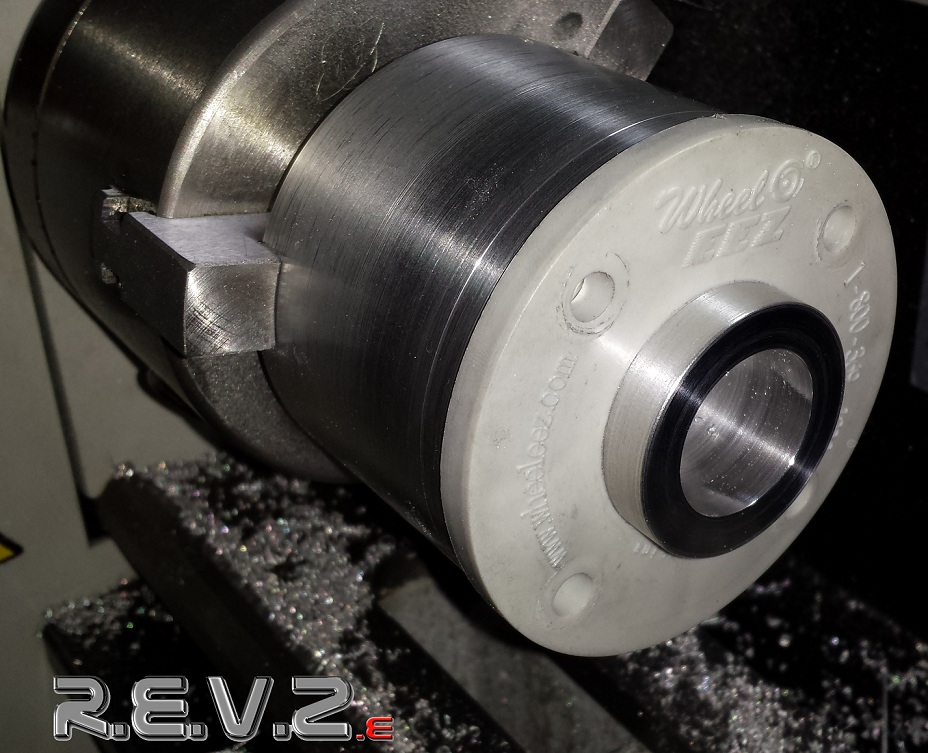
Il tronchetto di alluminio viene messo sul tornietto per essere rettificato.
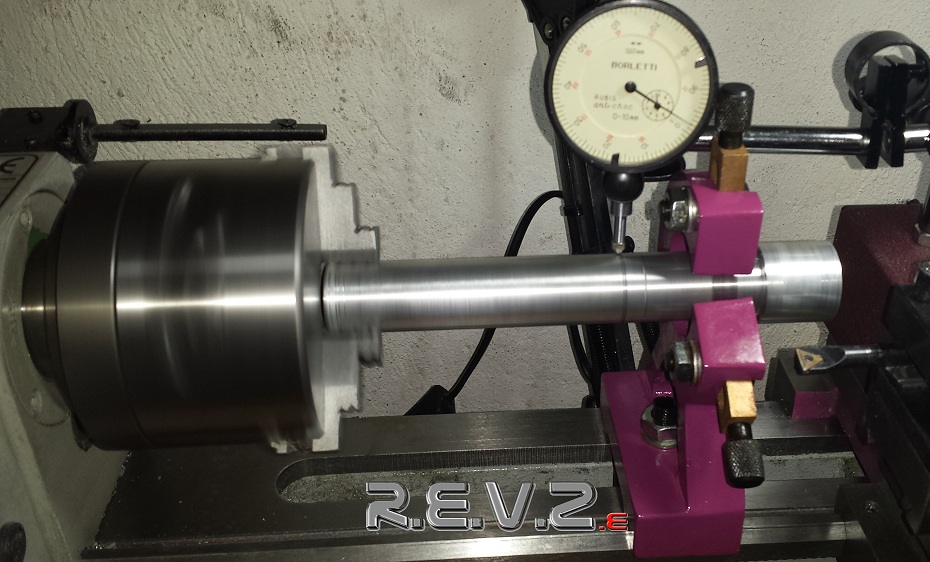
Prime misurazioni:
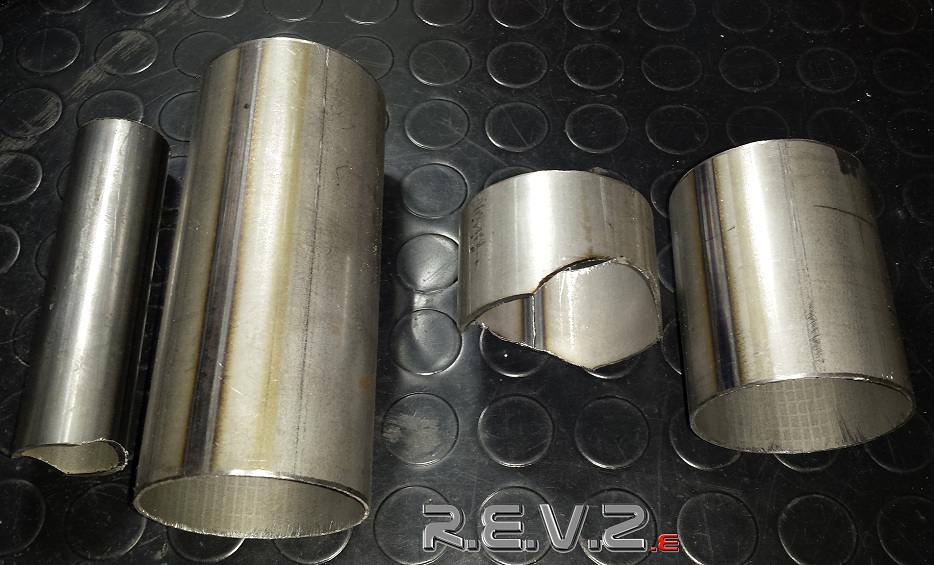
Taglio dei pezzi:
Adesso e' il momento dell'asse per l'innesto dell'albero motore:
Assemblaggio dei pezzi:
Montaggio in ruota:
Finito la prima ruota si ricomincia il giro per altri 5 volte:
Prossimo step, si inizia la costruzione del sistema rocker-bogie.
Buona Serata
Ciao
Ciro.
theremino
postato il: 07.06.2017, alle ore 05:19
Stai facendo un lavoro grandioso.
Esplorare Marte è interessante ma anche sulla Terra c'è molto da fare. Ancora non so a cosa potrà servire questo rover ma sono sicuro che quando comincerà a muoversi le idee fioriranno.
Solo per dirne una: Potrebbe essere utilissimo, guidato via WiFi, per chi fa documentari su animali pericolosi come i serpenti, o su animali che si vedono raramente e difficili da inquadrare. L'operatore potrebbe starsene comodo su una branda a leggere un libro e venire avvertito da un segnale acustico che la telecamera ha visto un movimento. A quel punto coi Joystick potrebbe seguire l'animale e inquadrarlo bene.
Quando verrà il momento di pensare ai sensori e alle applicazioni contribuiremo volentieri con l'esperienza che abbiamo accumulato per l'InOut con il sistema theremino.
Ma attenzione, non vorrei essere frainteso. Non sto suggerendo di usare il nostro sistema. Ma solo che una parte (piccola o grande) di quello che abbiamo già sviluppato potrebbe essere utile. Ad esempio le applicazioni per rivelare i movimenti di questa pagina:
http://www.theremino.com/downloads/automation#videoinput
In ogni caso siamo a disposizione per aiutare e saremo orgogliosi di poter dare un qualunque contributo, anche piccolo, a un progetto cosi interessante.
Ricongiungere il mondo digitale con il mondo reale e concreto.
RevRobot
postato il: 07.06.2017, alle ore 09:43
Grazie theremino, scusami se continuo a chiamarti cosi' ma non conosco il tuo nome il mio come si legge dalla firma e' Ciro.
Sarò onorato di discutere e provare il vostro sistema, ma vorrei prima che conosciate tutto l'Hardware (che non e' poco) poi creare un sistema che riesca a gestirlo.
Il Rover potrà essere usato come ho detto qualche post fa, per rilevazioni e analisi ambientali, in zone radioattive per esempio o con alto rischio di inquinamento nocivo per la salute umana, ma naturalmente modificando alcuni pezzi dell'hardware (essendo una costruzione a moduli) può essere usato in diversi ambienti.
Per i sensori per muoversi nell'ambiente, ho previsto una Xtion PRO LIVE per avere un ambiente in 3D e tutto ciò che circonda il rover, lasciando perdere le Cam e gli ultrasuoni per gli ostacoli... ma per queste cose c'e' anc ora molta strada da fare e sicuramente avrò bisogno di Voi.
Grazie per il Tuo e i vostri interventi.
Ciao
Ciro.
RevRobot
postato il: 07.06.2017, alle ore 10:54
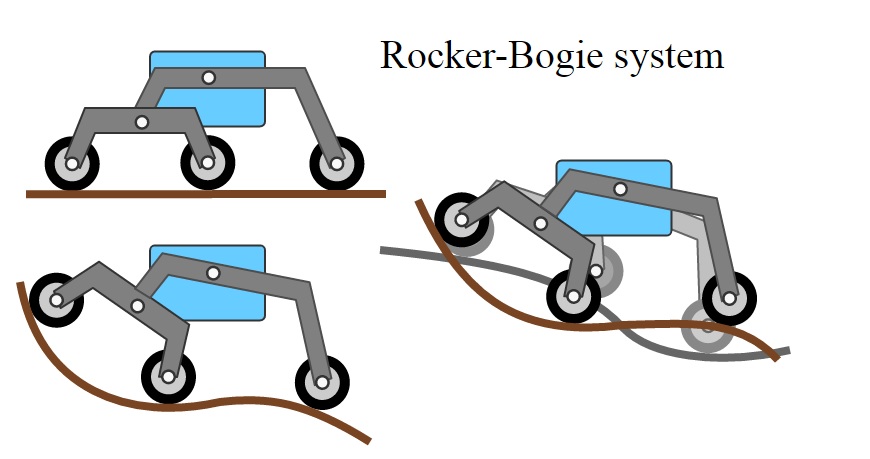
Il sistema che andremo a creare si chiama Rocker Bogie System.
Ce ne sono in rete di diversi tipi, per capire il suo funzionamento uno e' questo :
Quello che ho voluto creare io e' un po diverso, tra le ruote posteriori e quelle 4 anteriori sono indipendenti, per dare al rover piu' torsione nei movimenti su terreni accidentati.
Iniziamo alla costruzione dei tubolari (nel mio caso in Ferro zincato 60x20x3mm).
Alle due estremita' ho creato quegli incavi dove verranno poi saldati dei cilindri in ferro 60x58x2mm.
Per la parte anteriore e quella posteriore dove verra' poi creato il sistema di sterzo (rotazione delle 4 ruote - 2 anteriori e 2 posteriori), avremo bisogno di creare 4 serie di questi pezzi.
Posteriore : Tutti i pezzi escluso il telaio verranno poi verniciati con un aggrappante come fondo e una vernice Cromolux: smalto per cromatura spray fino a 400°C.
Il prossimo Step, supporti Motori e Creazione sistema di rotazione ruote.
Ciao
Ciro.
theremino
postato il: 07.06.2017, alle ore 11:31
RevRobot: Grazie theremino, scusami se continuo a chiamarti cosi' ma non conosco il tuo nome il mio come si legge dalla firma e' Ciro.
Chiamami pure theremino, oppure Livio, come ti viene più comodo di volta in volta.
E qui rispondo anche ad altri che lo hanno chiesto: chiamateci pure thereminici, thereminomani, thereministi o theremini, tutto va bene. Magari con la iniziale minuscola... Arduino maiuscolo, olivetti minuscolo, theremino minuscolo.
Ricongiungere il mondo digitale con il mondo reale e concreto.
RevRobot
postato il: 07.06.2017, alle ore 14:07
Buon Pomeriggio.
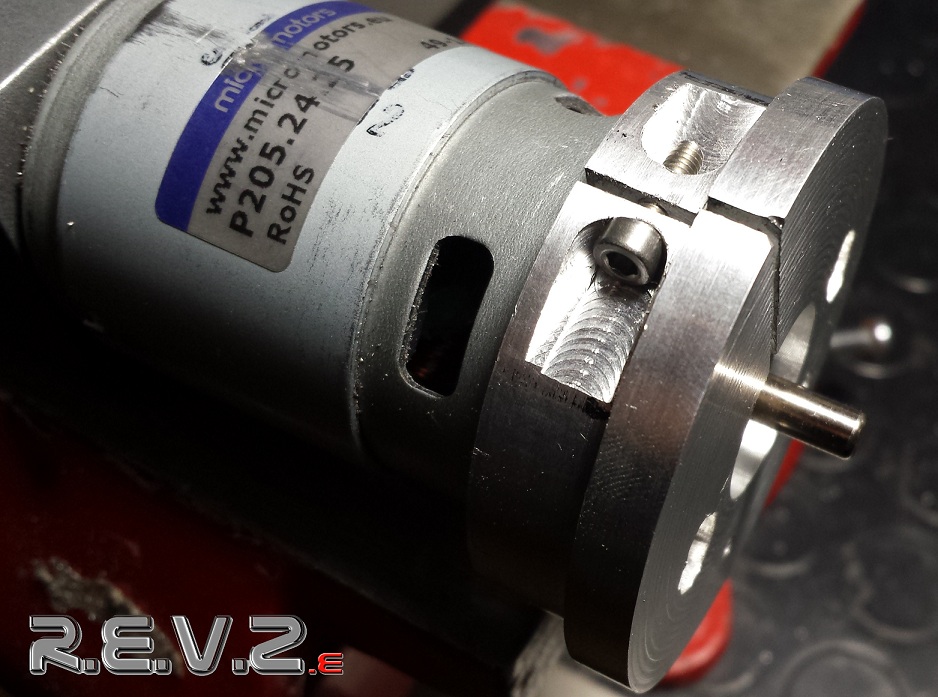
I motori utilizzati per il rover sono 6 belle bestioline 24V
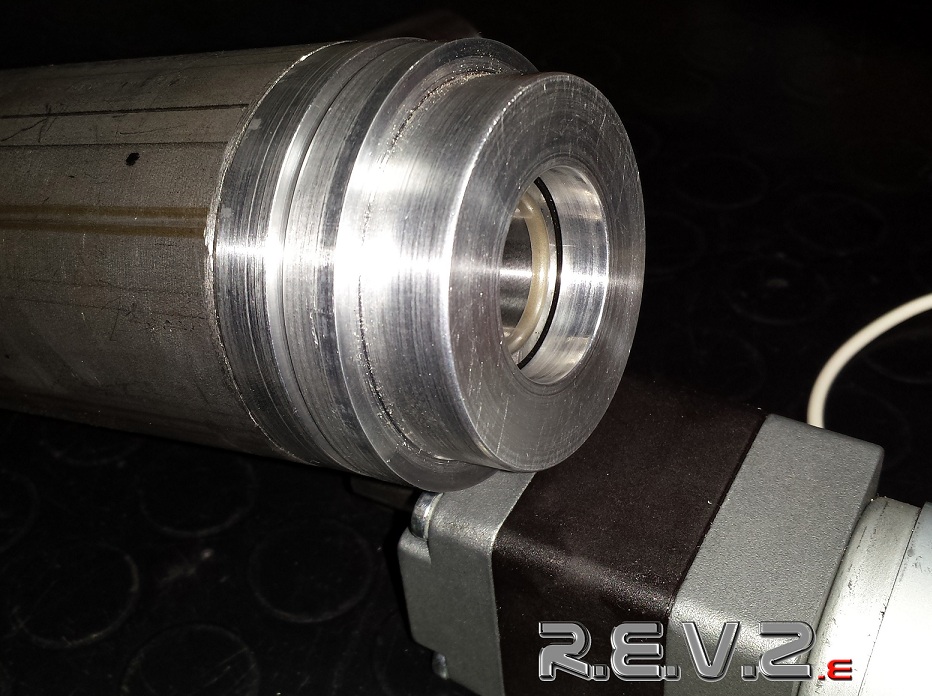
Siccome l'albero ruota viene bloccato direttamente sull'asse motore, ho deciso per far si che il peso non si scaricasse tutto sul motore ma una buona parte anche sulla struttura del rover, ho messo un cuscinetto.
Vediamo il procedimento di lavorazione (da premettere che non ho una CNC e devo fare tutto a tornio o a mano).
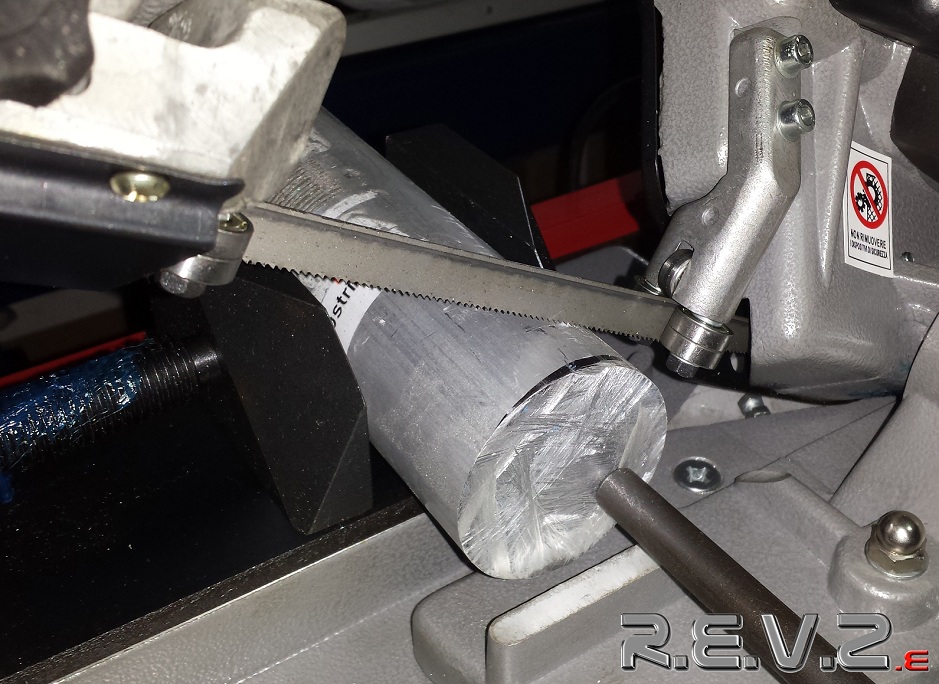
Tagliati 6 fette da una barra di alluminio da 70mm.
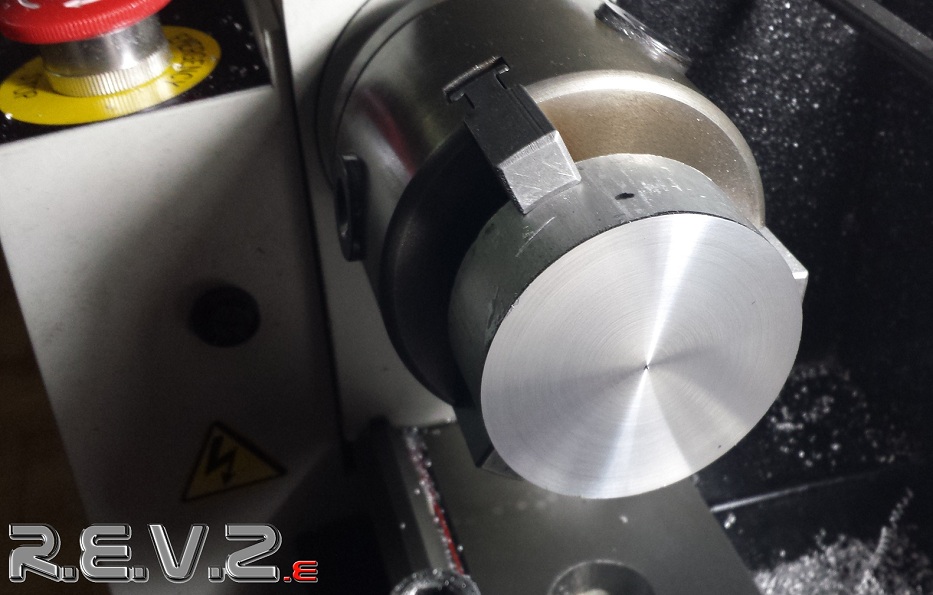
Pezzo quasi finito:
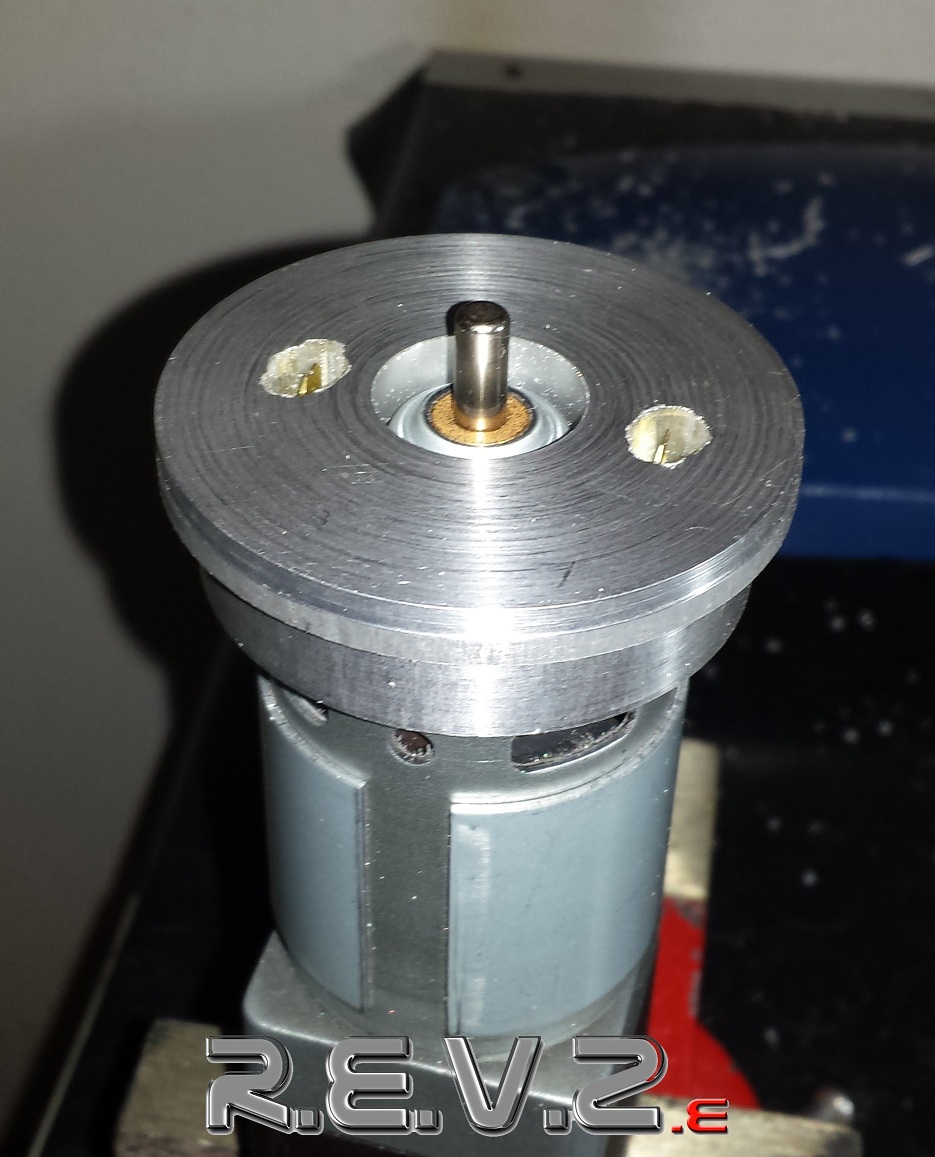
Per avere una base per il cuscinetto piana e solida, ho creato una specie di tappo con un foro centrale da dove uscira' l'alberino del motore.
Ho fatto i 4 fori svasandoli per bloccare poi il motore.
Montato nella sua sede:
Adesso devo far si' che le due parti vengano strette da 4 bulloncini da 4mm e devo creare un po di spazio per far si che il bullone entri senza problema.
Come ho detto non avendo una macchina CNC mi son dovuto ingegnare per creare degli utensili per il mio scopo.
Tutto questo per 6 motori.
Continua ....
Ciao
Ciro.
RevRobot
postato il: 07.06.2017, alle ore 18:44
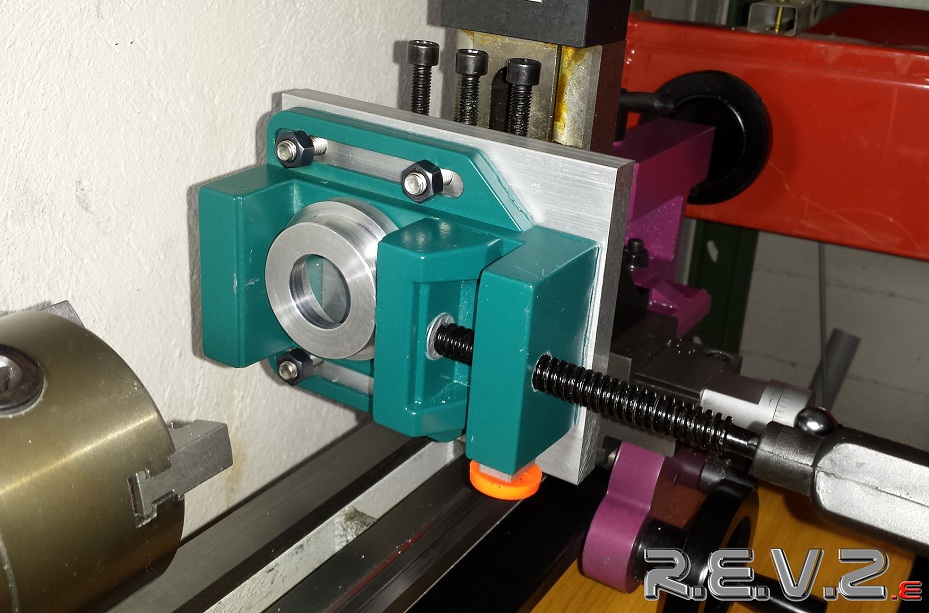
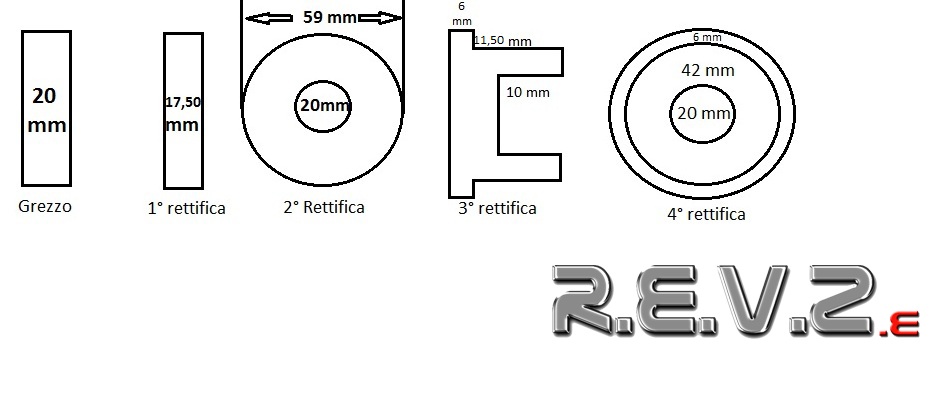
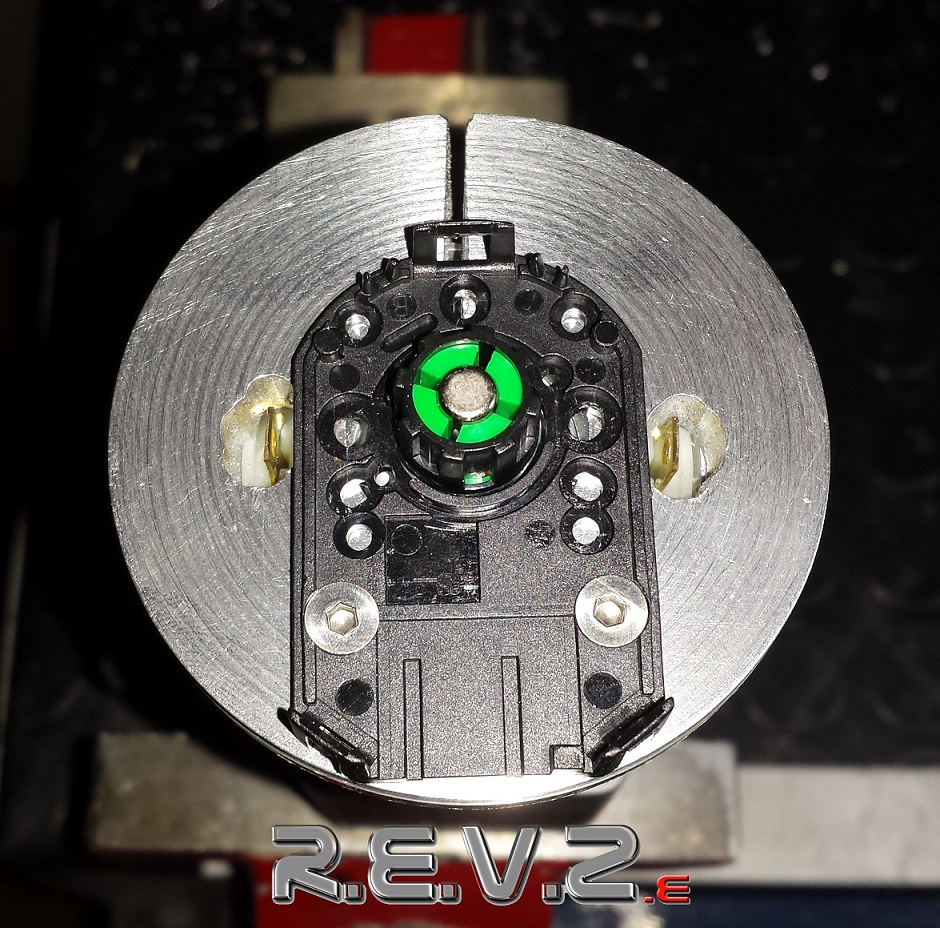
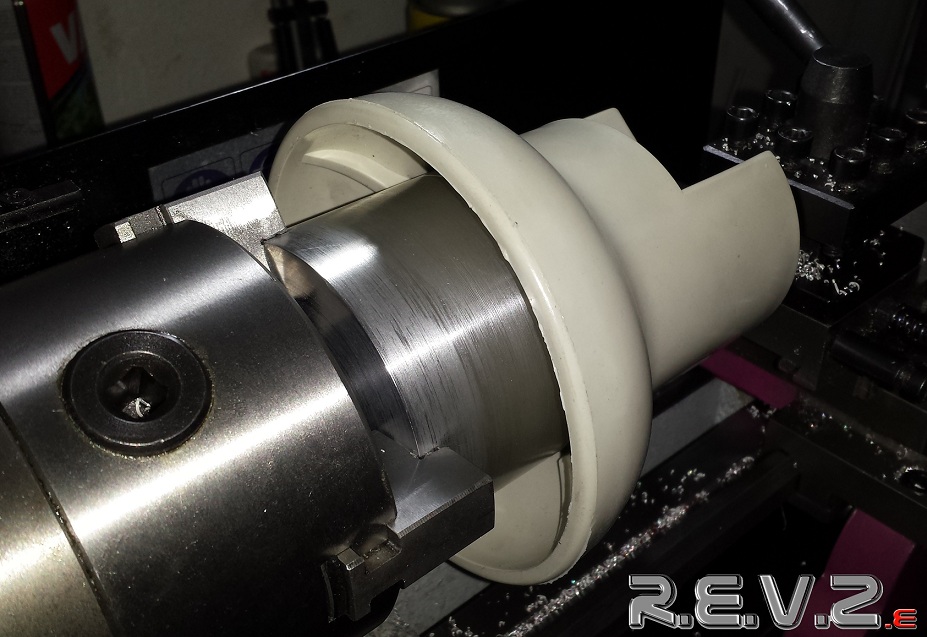
Stando sempre sui Motori, adesso dobbiamo creare dei supporti per il montaggio degli encoder l'idea era questa:
Io l'ho chiamato "Collare" e questo disegno mostra le fasi di lavorazione :
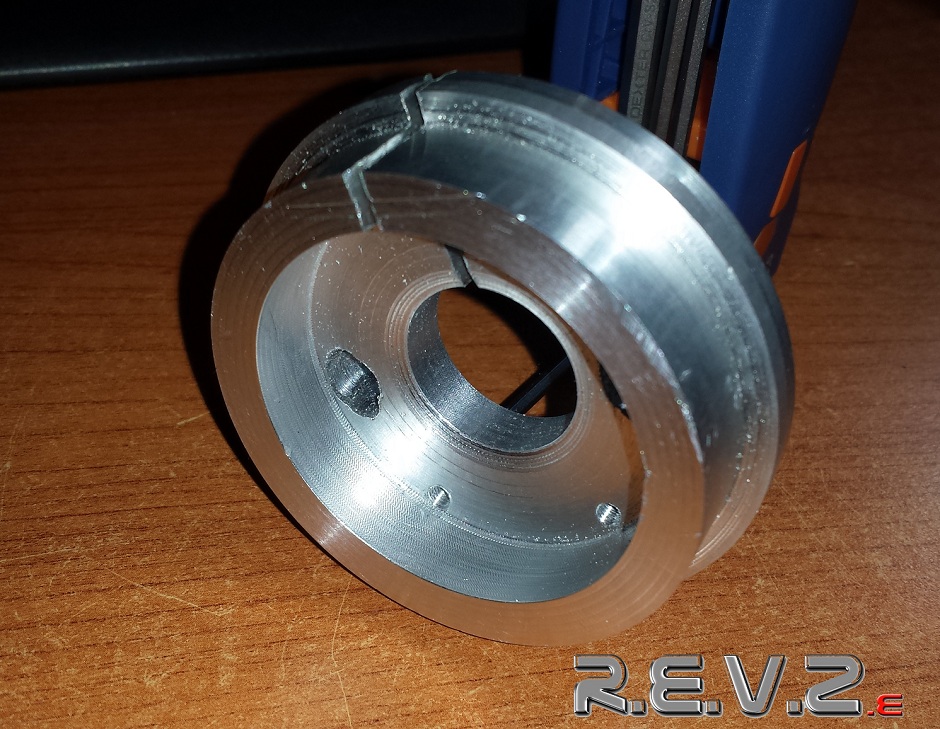
Ecco il pezzo rettificato a misura.
Adesso creo uno spacco che mi servira' per poi stringere il collare al motore.
Test di bloccaggio dell'encoder, ho usato un Encoder a quadratura AMT102-V Il collare e' quasi terminato lo testo sul motore per vedere se ha gioco prima di effettuare gli alloggi per il bullone di stretta.
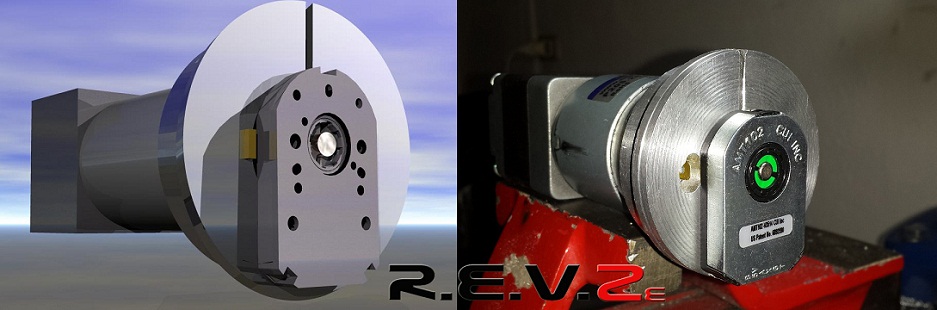
Dal 3D al pezzo in Real :
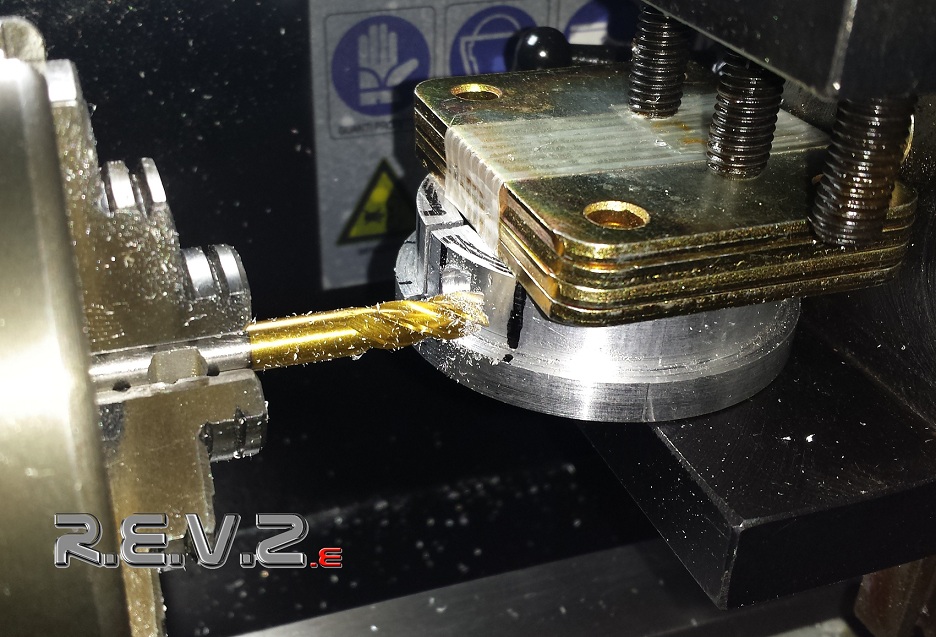
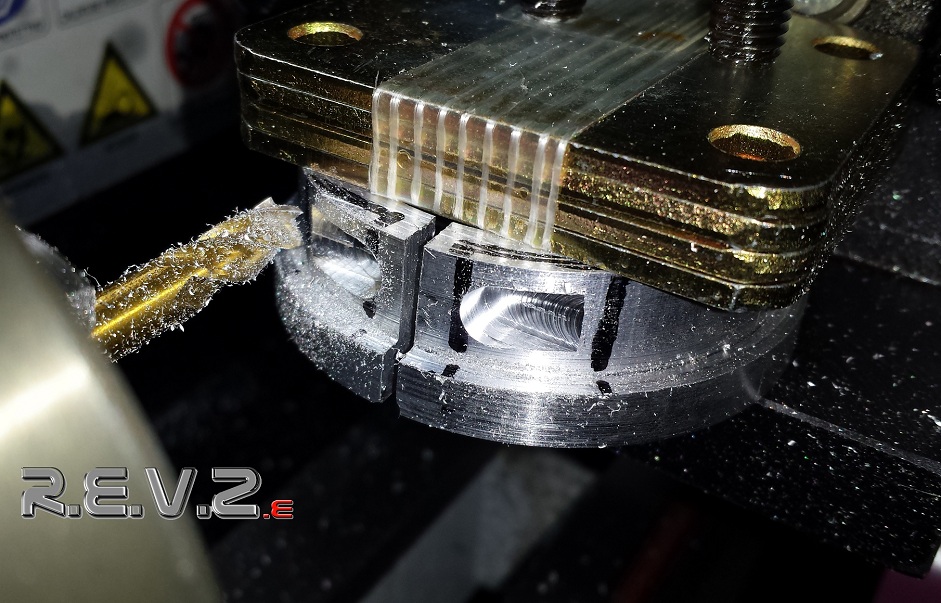
Sempre con il mio buon Tornietto ho creato gli incavi per il bullone di stretta: Ed eccolo una volta fresato, adesso manca solo 1 foro da 3,2 mm e uno da 2,45 dove farò la filettatura portandolo a 3mm.
Adesso mi tocca ripetere questo lavoro per altri 6 Motori, tagliati le fette di alluminio pronto per il prossimo giro :
Per oggi e' tutto, Vi faccio un po respirare.
Buona serata a tutti.
Ciao
Ciro.
RevRobot
postato il: 07.06.2017, alle ore 21:30
Buonasera, prima che ci addentriamo nel vivo del progetto, volevo comunicare al forum che le foto che sto postando a valanga si possono anche trovare in giro sulla rete perchè il mio progetto R.E.V.2e è nato nel 2003 con una versione meno evoluta di questa che Vi sto presentando, ero/sono iscritto anche su un'altro Forum sempre di Robotica Amatoriale dove il mio nome è devil2003, 2003 l'anno di inizio della nascita della prima versione di R.E.V.2, devil bhe' lo dice la parola forse per le mie idee poco terrene o perchè se 1 ne faccio 100 ne penso ? Bho non lo so, ma essendo rimasto solo a postare sul Sito precedente e Voi meglio di me sapete che in questo campo i problemi escono fuori come funghi e se non c'e' nessuno che ti puo' aiutare perchè stare li a menticare ?
Percio' mi sono consultato con un Admin di questo forum di questa cosa e ora la divulgo a voi, tutto ciò che posto e' mia personale e non devo citare nessuno articolo o persona e siccome si San.Tommaso in giro ce ne sono molti, Vi posso sempre invitare a casa mia per un caffe' cosi' Vi presento la mia creatura.
Tanto Vi dovevo.
[quote](RevRobot):....il mio progetto R.E.V.2e è nato nel 2003 ...[quote]
Questo mi consola un po', mi dicevo.... ma come fa a sfornare tutti questi po' po' di pezzi così velocemente, dai primi post avevo capito che lo stavi facendo ora.
Verrei volentieri a vederla dal vivo... ma stai un po' troppo lontano.
RevRobot
postato il: 07.06.2017, alle ore 23:52
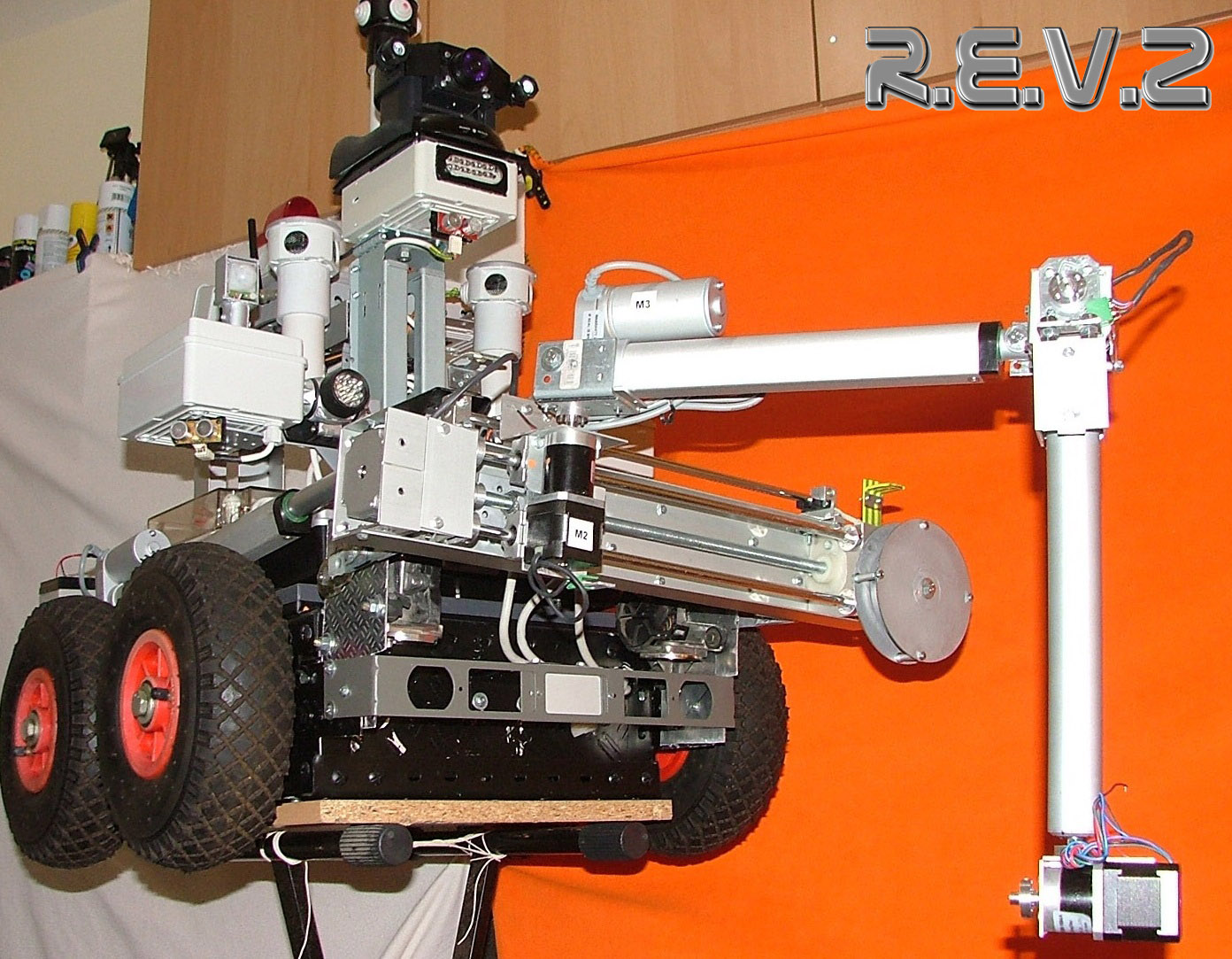
Ciao Roberto, il primo prototipo è nato nel 2003 ed era cosi' :
Poi nel 2014 ho rivisto e corretto molte cose dell'Hardware ed e' nato la versione Evolution, quello che Vi sto presentando pezzo dopo pezzo, perchè solo cosi' riusciamo a capire quanto lavoro e pazienza c'e' dietro a questa realizzazione.
Potrei postare tutto e subito, ma ho centinaia e centinaia di foto sul mio sito che uso come album e devo scegliere i momenti piu' significativi dell'avanzamento della costruzione, altrimenti ci perdiamo.
Con la velocita' di post spero che in 1 settimana riesco a postare tutto fino ai primi test di movimento sia del rover che del braccio robotico, poi sapendo cosa abbiamo davanti, spero di renderlo semiautonomo anche con il Vostro aiuto.
Come utente anonimo puoi leggere il contenuto di questo forum ma per aprire una discussione
o per partecipare ad una discussione esistente devi essere registrato ed accedere al sito



























 RevRobot:
RevRobot: