| |
| Autore |
Messaggio |
opzioni |
  RevRobot RevRobot


postato il:
12.06.2017, alle ore 16:41 |
guzzj ottima idea, ma come si può rompere 1 attuatore bloccando una ruote, si può rompere proprio l'unico che c'e' bloccando le 4 ruote, tutto può succedere.
Ma poi voglio ricordare che è un rover terrestre in caso di guasto o perdita di controllo, lo si può sempre recuperare.
Ciao
Ciro. |

|
guzzj



postato il:
12.06.2017, alle ore 16:48 |
nn avendo capito che lo sterzo lavora a ruote opposte e non a ruote parallele, ti avevo suggerito la barra di unione.
Non è obbligatorio usare il paracadute, ma ricorda, lo puoi fare una volta sola. |
|
RevRobot
postato il:
12.06.2017, alle ore 16:50 |
 guzzj guzzj: rifaccio una domanda: visto che il campo oleodinamico negli ultimi anni si è evoluto in modo esponenziale, perché non usarlo? con una micro pompa e vari attuatori ad olio, e soprattutto un peso inferiore e una potenza maggiore, si potrebbero risolvere molti problemi e risparmiare energia.
guzzj è anche perchè ho tutto quello che serve per far muovere a questa bestiolina da 70Kg, se lo stessi iniziando adesso , giuro che un esperienza di usare attuatori ad olio l'avrei fatta.
Mai dire mai per il futuro .....
Ciao
Ciro. |
|
guzzj
postato il:
12.06.2017, alle ore 16:54 |
Grazie per la considerazione che mi hai dimostrato, e ti faccio i complimenti per il progetto che è molto interessante.
Non è obbligatorio usare il paracadute, ma ricorda, lo puoi fare una volta sola. |
|
RevRobot
postato il:
12.06.2017, alle ore 17:08 |
Figurati Grazie a Te dei tuoi interventi.
Anzi ne approfitto vedendo come Avatar un Aereo, conosci Mission Planner con l'ausilio di Pixhawk ?
Perchè questa domanda, sperando che non mi linciano gli amici esperti del forum, inizialmente per fare prima con poche risorse mentali, volevo usare la scheda Pixhawk come gestore dell'hardware e Mission Planner come software.
Se si, come va questo software in abbinamento con ArduPilot o Pixhawk ?
Scusate per questo fuori topic, dopo giuro che rientro subito.
Ciao
Ciro. |
|
guzzj
postato il:
12.06.2017, alle ore 17:34 |
guarda, il mio avatar nasce dal fatto che sono il segretario del nostro campo volo a Verbania, e tra l' altro volo solo esclusivamente con aerei semplici, e non uso droni, indi mi prendi in contropiede, comunque qui sul forum cè gente molto esperta che ti saprà dare una risposta.
Non è obbligatorio usare il paracadute, ma ricorda, lo puoi fare una volta sola. |
|
schottky

postato il:
12.06.2017, alle ore 18:55 |
Ok mi ero perso il fatto del funzionamento come "cingolato", anche in questa modalità però il calcolo preciso della velocità può facilitare il lavoro dal punto di vista del consumo energetico.
Il vantaggio di essere intelligente e' che si puo' sempre fare l'imbecille, mentre il contrario e' del tutto impossibile. -- W. Allen |
|
RevRobot
postato il:
12.06.2017, alle ore 21:26 |
MiniPc finito installazione S.O. driver e tutti gli aggiornamenti di Win7.
Questo prenderà posto come computer di bordo del rover (manca software di gestione da decidere).
In questi giorni oltre a confrontarci sul software creazione e/o installazione vedrò di iniziare un lavoro parallelo della stazione di monitoraggio ambientale che fa parte delle unità logiche di II Livello.
In più inizierò nei tempi morti la configurazione dei 3 dual motor driver.
Per ora Vi auguro una buona serata.
Ciao
Ciro. |
|
RevRobot
postato il:
14.06.2017, alle ore 21:10 |
La PcBoard è stata posizionata nel Box Elettronica, 
in più sto perfezionando il software per la gestione dei sensori ambientali, rilevatori dei Gas nocivi, qualità dell'aria, temperatura e Humidità.
Il tutto verrà gestito da una logica di II Livello che preleverà i dati dai sensori e tramite l'RS485 verranno spediti alla PcBoard che penserà ad elaborarli e compararli con tabelle nel Database e con altri dati pervenuti da altri sensori, una volta elaborati verranno archiviati in un Database di bordo e trasmessi in Telemetria alla stazione base.
I sensori con l'Arduino Uno R3, verranno inseriti dentro ad un cilindro di alluminio per proteggerli dagli agenti atmosferici (di questo cilindro ne parlerò più avanti per la sua costruzione).
Per ora è tutto....
Ciao
Ciro. |
|
RevRobot
postato il:
17.06.2017, alle ore 19:42 |
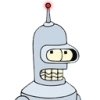
un'altro Step raggiunto nella realizzazione del Box dei Sensori per la qualità dell'aria.
All'interno dell'involucro cilindrico, ci sono dei sensori per le analisi della qualità dell'aria, verranno gestiti da un Arduino Uno R3 che prenderà i dati rilevati dai sensori e tramite un Bus Rs485 le invia alla PcBoard dove verranno ulteriormente elaborati.
 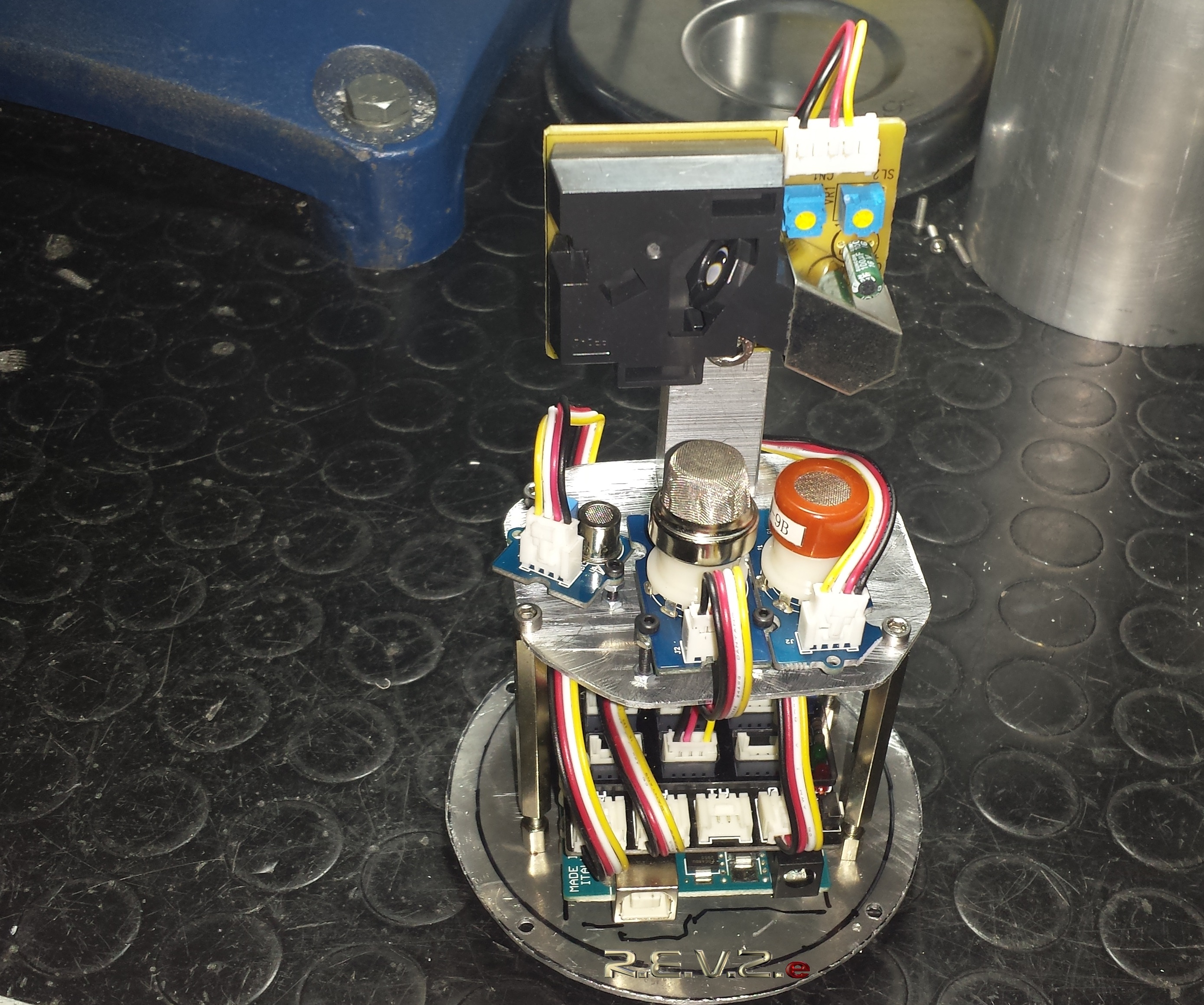  
Per ora è tutto, al prossimo Step.....
Ciao
Ciro. |
|
| |
