FORUM: Robotica, CNC, 3D
Finalmente un posto dove poter discutere di robotica di CNC e stampanti 3D, scambiarsi idee, progetti ed opinioni. Partecipa anche tu...
Direi che cingolata potrebbe anche starci, del resto ci sono anche di gomma. Potrei invece penare ad una pompa idraulica per la trazione e distribuzione della potenza.
Sensori a contatto per evitare gli ostacoli, come quello per gli aspirapolvere. Magari sarà anche che deve avere uno scomparto di raccolta e al momento di troppo pieno, possa sospendere il ciclo e scaricare la "sporcizia", dato il percorso memorizzato.
Se l' idraulica influisce, quindi fai un conto del tipo pacco batterie di un muletto. Se la logica è razionale, potrebbe anche avere una capacità ridotta, tanto il controllo determinerebbe quando sospendere il lavoro e andare a fare la carica. Una volta finita la carica, riprendere il lavoro al punto sospeso. Tanto lo si potrebbe impostare per lavorare di continuo, tenuto conto che ci sono i periodi di ricarica.
Magari poi ci potrebbe essere il periodo notturno, che non dovrebbe lavorare per non disturbare gli animali.
Anno nuovo, forum nuovo.
Mi sa che lascio.
schottky
postato il: 16.09.2018, alle ore 07:26
I problemi sollevati dalla realizzazione di un robot REALE autonomo delle dimensioni e peso descritti che deve svolgere AUTONOMAMENTE le funzioni richieste sono enormi (e inimmaginabili senza preparazione specifica). Non a caso prodotti industriali di questo tipo (più o meno) hanno costi di decine di migliaia di euro.
Consiglio prima, per iniziare a comprenderle, lo studio di un buon libro di robotica mobile (per la parte navigazione e guida) e di azionamenti industriali per Powertrain
Il vantaggio di essere intelligente e' che si puo' sempre fare l'imbecille, mentre il contrario e' del tutto impossibile. -- W. Allen
guzzj
postato il: 16.09.2018, alle ore 09:17
non entro nel merito della logica, ma prendi in considerazione una cosa del genere
https://www.ebay.it/p/Trazione-cambio-Trasmissione-trattorin… lo abbini a un motore 24v con cinghia e ti ritrovi che il peso della meccanica e delle 4 batterie al piombo, escluso telaio, intorno ai 100 kg.
una trasmissione di quelle ha bisogno di poca potenza per funzionare rispetto a una trasmissione a ingranaggi, visto che il motore deve fare girare la pompa ad olio. volendo con due lo fai 4x4.
le mie sono solo idee.
Non è obbligatorio usare il paracadute, ma ricorda, lo puoi fare una volta sola.
schottky
postato il: 17.09.2018, alle ore 05:58
Un 4x4 che va solo dritto (più o meno) Il fatto è che non si può progettare una cosa senza tener conto del tutto, non so se la trasmissione che hai postato è dotata di differenziale ma anche supponendo che lo sia l'unico modello cinematico che si può ipotizzare è un classico un asse motore e uno sterzante, con tutte le complicazioni connesse alla geometria dello sterzo. Su piccoli mezzi guidati da un operatore e a bassissima velocità si può per esempio trascurare la differenza dell'angolo di sterzo tra ruota interna ed esterna, quello che si paga è un certo slittamento trasversale, il punto focale è la presenza del guidatore a bordo che col suo sistema occhi cervello è presto a correggere ogli errore.
Se non si costruisce un sistema che sostituisce efficacemente il complesso occhi-cervello non si va da nessuna parte.
Mettere in pratica le affermazioni "fa un percorso predefinito" "ritorna alla stazione di ricarica" è difficilissimo e richiede competenze specialistiche di alto livello.
Non ci illudiamo che la differenza tra il piccolo robot con Arduino che abbiamo tutti costruito e la bestia che vuol fare agric sia solo un fattore di scala.
Il rischio è avere un oggetto di quelle dimensioni e quel peso che va in giro per i fatti suoi ammazzando gli animali che agric ha detto esse presenti
Il vantaggio di essere intelligente e' che si puo' sempre fare l'imbecille, mentre il contrario e' del tutto impossibile. -- W. Allen
schottky
postato il: 17.09.2018, alle ore 06:51
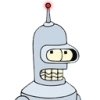
Ecco qua un esempio di quello che vorrebbe fare
https://www.generationrobots.com/en/402177-husky-a200-ugv-mo… Ovviamente la base non prevede le unità di sensing avanzate co ne consentano la localizzazione spaziale e non comprende il sistema di visione artificiale.
Il vantaggio di essere intelligente e' che si puo' sempre fare l'imbecille, mentre il contrario e' del tutto impossibile. -- W. Allen
Il vantaggio di essere intelligente e' che si puo' sempre fare l'imbecille, mentre il contrario e' del tutto impossibile. -- W. Allen
guzzj
postato il: 17.09.2018, alle ore 09:24
la mia era solo una idea per poter fornire un asse differenziale valido per un progetto del genere. queste trasmissioni ad olio le puoi configurare come vuoi, non quella della foto, e forniscono più cavalli alla ruota di quello che monti per far funzionare la pompa. sono d' accordo con te che questo progetto senza operatore ha un rischio molto elevato in fattore di sicurezza per gli uomini e soprattutto per gli animali, e ti dico di più, la mia officina sarebbe autorizzata a poter costruire un macchinario del genere, ma potrei autorizzare solo la costruzione di una macchina controllata a uomo e non automatica.
comunque se uso due di quelli postati e ne uso uno al retrotreno fisso, e quello anteriore infulcrato al centro ho un mezzo 4x4 sterzante senza strisciamento delle ruote perché tuti e due hanno un differenziale di tipo classico interno.
Non è obbligatorio usare il paracadute, ma ricorda, lo puoi fare una volta sola.
guzzj
postato il: 17.09.2018, alle ore 09:35
ps, mi sa che è più facile attaccare una sorta di palone raccoglitore alla mucca e insegnarli il tracciato da fare, l unico inconveniente è che non è a emissioni zero.
Non è obbligatorio usare il paracadute, ma ricorda, lo puoi fare una volta sola.
double_wrap
postato il: 17.09.2018, alle ore 10:12
schottky: [CUT] il punto focale è la presenza del guidatore a bordo che col suo sistema occhi cervello è presto a correggere ogli errore.
Se non si costruisce un sistema che sostituisce efficacemente il complesso occhi-cervello non si va da nessuna parte. Mettere in pratica le affermazioni "fa un percorso predefinito" "ritorna alla stazione di ricarica" è difficilissimo e richiede competenze specialistiche di alto livello.[CUT]
Concordo del tutto sul fatto che il sistema di guida sia il punto centrale di tutto il prgetto, la piattaforma semovente e' (relativamente) semplice da realizzare.
Una via da esplorare potrebbe essere quella di posare un cavo (o qualcosa di simile) interrato in modo che un qualche sensore possa seguirlo correggendo la marcia. Un percorso alternativo sarebbe poi attivato per tornare alla stazione di ricarica. Nel cavo si invia un segnale modulato che e' ricevuto dalla piattaforma, come si usa nei cercatubazioni sotterranei in ambito telefonico ed elettrico.
Lo so che il tuo pavimento e' di cemento e che servirebbe scavare una traccia per posare un piccolo tubo corrugato, ma un percoso ottico non e' realizzabile in funzione delle deiezioni presenti.
Altro problema da risolvere e' l'urto con le vacche perche' 2-300 chili di ferro fanno male anche a loro. Si potrebbe pesare ad un leggero (e dico leggero) dissuasore elettrico HT come quello dei recinti elettrificati per farle spostare, dopo un po' imparano e si allontanano da sole quando arriva lo spazzino.
"se peso cado, ma se cado non peso"
adamatj.altervista.org
agric
postato il: 17.09.2018, alle ore 10:14
@schottky Grazie per "l'infarinata" ho sfogliato il testo velocemente e c'è tanta roba interessante.
L'esempio del robot non è cosi,a parte la sua struttura, ma il modo di navigare, voglio, vorrei costruire un facsimile non a quel livello.
Personalmente non ho mai costruito un robottino con Pic o arduino ho solo partecipato in maniera blanda su lavori altrui.
C'è da studiare e un'approccio in prima persona per toccare con mano le problematiche che esponi anche sul semplice robottino è da fare.
@guzzj Grazie del link.
Devo dire che quel differenziale l'ho gia avuto tra le mani( manca solo la parte del cambio).
Utilizzare l'idraulica potrebbe essere una alternativa, dipende un po anche dal rendimento e manutenzione del sistema.
e forniscono più cavalli alla ruota di quello che monti per far funzionare la pompa qui la citazione
questa non mi torna,che sia coppia?
meglio essere un granello di pepe che una cacca d'asino
Come utente anonimo puoi leggere il contenuto di questo forum ma per aprire una discussione
o per partecipare ad una discussione esistente devi essere registrato ed accedere al sito













 schottky:
schottky: